









איתור של מגיבים ראשונים עמוק בתוך תשתית מוכחשת – GPS בדיוק גבוה היה משימה מתחמקת של קהילת סגל בטיחות-אש וחרום למשך למעלה מעשור. המטרה היא לאתר מיקום בתוך מטרים אחדים, במהלך של עשרות דקות. אלה במקרה הם גם אותן המטרות עבור מערכות הנחייה של טילים טקטיים, והפתרונות המועדפים כיום עבור מערכות כאלה עשויים לעלות לפחות $10k, בנוסף ליצירת ממדים/משקל/הספק אסורים. אותם הפתרונות שימשו במתקני המחשה בעלי הוכחת-כושר מוקדמים עבור המגיבים הראשונים, אך התגלו כמחסומים (עלות וממד) לפריסה אמיתית.
קביעת איתור מגיב ראשון לכן נשארה אחד מיישומי האיתור המורכבים ביותר הקיימים כיום. שום חיישן בעל כדור-כסף לא יכול להשיג את המטלות הרצויות – במקומם, דרושים קשרי טכנולוגיה מרובים, כל אחד מהם בקצה המוביל של היכולת. יתר על כן, הוא מחייב גישה של -פיוז’ן-חיישן ושילוב מערכות בקנה מידה גדול.
-
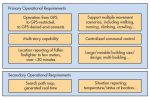
- איור 1
-
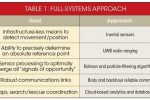
- טבלה 1: גישה מערכתית מלאה
מסמכים קשורים
טלפון חכם מוכן-לרחוב מגביר את התקשורות של מגיב ראשון
שאלות ותשובות: Ian Chen מ-Freescale דן בפיוז’ן חיישן
ראיון: Tim Kelliher מ-Movea דן במגמות הפיוז’ן חיישן
חיישנים אינרציאליים MEMS איכותיים, יעילים לעלות, יכולים לספק כעת את ההתחלה של פיתרון פוטנציאלי. מאמר זה מכיל מערכת פיוז’ן חיישן- חיישן-לענן הכוללת אלגוריתמים מאוד מתוחכמים. הגישות העיקריות והטכנולוגיות המאפשרות זאת מתוארות בטבלה 1.
האתגרים העיקריים המוצבים בפני מפתחי מערכות ניתנים לסיכום בשלושה סוגים רחבים: נוהליים, סביבתיים ופיוז’ן חיישן. יש להבין ללא פשרות את האופי המאוד מורכב של מטלת המגיב הראשון, המשולבת באתגרים הכרוכים בסביבה השונה והקיצונית, במהלך תכנון של פיתרון מרובה-חיישנים.
-
- איור 2
-

- טבלה 2. יתרונות ומגבלות של חיישנים
-
- טבלה 3: ביצועי ניווט של MEMS
-
- טבלה 4. חיישני MEMS תעשייתיים כנגד זולים
נוהלים
משימת החיפוש וההצלה של אבטחת אש עוקבת אחר תהליך מאוד משמעתי, אשר צריך בו-זמנית להתאים לתרחישי חיים אמיתיים לא דטרמיניסטיים מלאים. מערכת איתור מדויקת הניתנת לפריסה צריכה להתאים לנוהלים וציוד קיימים, ככל שהדבר ניתן.
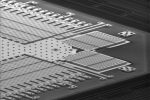
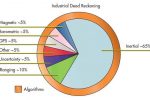
לכן, אחת הדרישות היא להיות מבצעי ללא כל תשתית קבועה או תואמת. מאחר שמגיבים ראשונים כבר מועמסים בציוד משמעותי (משקל ועלות), כל פריסה של מערכת צריכה להיות מונחית מהשלבים הראשונים על-ידי המטלות של השגת מיוד מוטבע ממוזער, ועל-ידי עלויות המגיב בסדר גודל של טלפון חכם (כדאי כאן להדגיש שביצועי איתור טלפונים חכמים קיימים אינם תואמים; ומכאן האתגר). איור 1 מדגיש את הדרישות התפעוליות הראשוניות והמשניות של המערכת הרצויה.
-

- איור 3 : ביצועי MEMS והתקדמויות האינטגרציה המאפשרים מערכת שניתנת לפריסה
-
- איור 4
-
- איור 5
-

- איור 6
-
- טבלה 5. MEMS תעשייתיים כנגד ג’ירוס מסיבים אופטיים
-
- טבלה 6 : סקירה ברמת המערכת של יחידת המדידה האינרציאלית של ADI
-

- טבלה 7: שלבים של משימת המגיב הראשון
דרישות תפעוליות ראשוניות
סביבה
בשעה שמיקום מחוץ לבית הפך לנפוץ מאוד עם כיסוי של GPS, סביבה בתוך הבית או מעורבת (בבית/מאותגרת-מחוץ לבית) היא הרבה פחות נתמכת. מצבי מיקום ביתיים (כגון מרכזי קניות) אחדים ניתנים למימוש עם תשתית מותקנת. אולם, אלה אינם מדויקים או מעשיים עבור המטרה של מגיב ראשון. עבור מתכנן מערכת של מערכת עקיבה, השיקולים הבאים קובעים את הגדרת התכנון, בחירת הרכיבים והגישות של מיתון הסיכונים:
נתיבי התפשטות RF
השפעות טמפרטורה/הלם על החיישנים
אפשרות של תשתית ניזוקה/משתנה
פיוז’ן חיישנים
האתגרים המצוינים לעיל בתהליך ובסביבה מהווים את הבסיס של הגישה לתכנון מרכזי עבור בעיה זו: פיוז’ן חיישנים. אופני חישה ראשוניים רלוונטיים נבחרים כדי לספק ביצועים ללא פשרות באופני תפעול קריטיים, בעוד שבאותו הזמן חיישנים משלימים מותאמים למכשולי המפתח עבור כל שלב של היישום (טבלה 2).
בשל היכולת של מערכות מיקרו-מכניות microelectromechanical systems לתפקד חופשיות מתשתית חיצונית ולספק דיוק בסביבה דינמית, הן מצופות לשחק תפקיד ראשוני בפיתרון הכולל. זה אומר, כמובן, אם הן יכולות לתפקד בסביבות קיצוניות והן קשורות לחיישנים משניים מתאימים.
ההתקדמות ב-MEMS
בשעה שהתקני MEMS צרכנים אינרציאליים חותרים לקראת הפיכתם לנוחים יותר (עם מוקד מוגבל על מפרטי הביצועים), ו-MEMS צבאיים נשארים יקרים עד כדי איסור, MEMS תעשייתיים ושל רכב (איור 2) שואפים לאפשר רמה סבירה של ביצועים ועלות.
המגזרים התעשייתיים ושל רכב דורשים חישה מדויקת בסביבות יחסית מורכבות וקיצוניות, בהשוואה למגזר הצרכני. כתוצאה, ספקים למגזר זה כללו תכונות ארכיטקטוניות המכוונות במיוחד לדחיית שוללי ביצועים דוגמת תנועה מחוץ לציר, אירועי רעידות והלם, ושגיאות הנגרמות על-ידי זמן וטמפרטורה.
אם כי תכונות תכנון כאלה מסופקות בקלות דרך חיישנים גדולים יותר או תהליכים יקרים יותר, הלחצים הכלכליים על הן שוק הרכב והן התעשייתי הגדל בחשיבותו מחייבים גישה קריטית יותר לתכנון למען ביצועים ויעילות העלות. התוצאה היא מיצוב ביצועים/מחיר מושך ביותר עבור רכיבי MEMS המפותחים במיוחד עבור יישומים תעשייתיים.
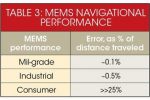
טבלה 3 משווה את אחוז השגיאה המתייחס למרחק המבוצע עבור שלושה סוגים עיקריים של רכיבים. MEMS בדרגה תעשייתית יכולים לספק יכולת ניווט כמעט גדולה כמו התקנים צבאיים איכותיים בשעה שהפרש המחיר של רכיבי MEMS צרכנים שהפכו לנוחים יותר הוא סביר.
כדי להבין יתרון זה, יש להביט לעומק יותר בתוך המפרטים הקריטיים של רכיב MEMS בהשוואה ליישום המיועד. במקרה של מטלה של מגיב ראשון, אחת המטרות של חיישני MEMS היא להבחין בסוג התנועה המבוקשת ולמדוד לאחר מכן את הצעדים והפסיעות.
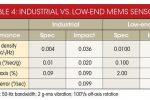
בניגוד לדגם התנועה של הולך-רגל, תנועה של מגיב ראשון תהיה יותר מקרית, דינמית וקשה לאבחון. יתר על כן, בשל מטלות הדיוק, החיישן צריך להיות מסוגל לדחות תנועה “לא נכונה” כגון רעידה, הלם ותנועה מצד לצד של הרגל או הגוף. שלא כמו בניתוח דיוק פשוט המבוסס מסביב לרעש החיישן, שעשוי להיות מספיק עבור דגם הולך הרגל, דגם המגיב הראשון צריך לכלול מפרטי מפתח כגון דחיית g ליניארי ורגישות לאורך הציר.
טבלה 4 מספקת השוואה צד לצד של התקן MEMS תעשייתי ולא איכותי, תוך הסתכלות על שילוב שגיאת ה- RSS של שלושה מפרטים חשובים. ניתן לראות בנקל שהרעש איננו הגורם השולט. דווקא השיקולים השולטים הם ביצועי ה-g הליניארי והציר הצולב, דברים שרוב ההתקנים הזולים אפילו לא מציינים.
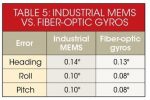
רק לפני מספר שנים, חיישנים אינרציאליים איכותיים הושגו ככלל רק דרך גישות דוגמת אופטיקה של סיבים. אולם, כיום, תהליכי MEMS תעשייתיים הוכיחו בעליל שהם יכולים לענות למטלה – טבלה 5 מציעה השוואה יחסית למדידות הניווט העיקריות.
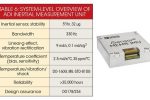
דוגמה של יחידת מדידה אינרציאלית MEMS inertial measurement unit – IMU)) היא ה-ASIS16488A של Analog Devices (איור 2, שוב), הכוללת חישה איכותית בעלת 10 דרגות חופש. היא אושרה עבור אוויוניקה מסחרית (טבלה 6), והיא מוכיחה את מוכנותה לענות לדרישות הקיצוניות של יישומי תגובה ראשונה.
התקדמויות בביצועי MEMS אינרציאליים, עם הוכחה מתמדת של איכות וקשיחות, משולבות עתה עם צעדים רחבים משמעותיים באינטגרציה. משוכה אחרונה זו מאתגרת במיוחד, מאחר שגודל החיישן יכול להיות יחסית הפוך לביצועים וקשיחות גם יחד אם לא נוהלו אחרת. סדרה מאוד אסטרטגית, מתואמת ומאתגרת של התקדמויות בתהליך צריכה להיות מוכחת וממוזגת כדי לאפשר את רמת “צפיפות הביצועים” הדרושה עבור יישום זה (איור 3).
שקלול החיישן
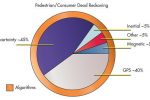
לאחר בחירת החיישנים המתאימים עבור יישום נתון מופיע ניתוח מעמיק כדי להבין את משקלם (רלוונטיות) במהלך שלבים שונים של המשימה הכוללת. במקרה של “חישוב גס של הולך-רגל” הפיתרון מוכתב בעיקר על-ידי הציוד הזמין (לדוגמה חיישנים מוטבעים בטלפון חכם) יותר מאשר תכנון לשם ביצועים. בתור שכזה, קיים ביטחון כבד על GPS, כאשר החיישנים האחרים הזמינים כמו הפריטים האינרציאליים והמגנטיים מציעים רק תרומה של אחוז קטן עבור התפקיד של קביעת מידע מיצוב שימושי.
דבר זה פועל יחסית היטב בחוץ, אולם בסביבה עירונית צפופה או בתוך בתים, GPS איננו זמין. שלב זאת עם האיכות הירודה של חיישנים זמינים אחרים, ואז הדבר יותיר פער רחב או “אי-ודאות” באיכות המידע במיצוב. מסננים ואלגוריתמים מתקדמים משמשים לרוב כדי לתפעל חיישנים אלה, אולם ללא חיישנים נוספים או חיישנים איכותיים יותר, התוכנה תתרום אך מעט כדי לסגור את פער חוסר הודאות. לבסוף, הדבר מפחית משמעותית את האימון במצב המדווח. דבר זה מוצג מושגית באיור 4.
כנגד זה, תרחיש בחישוב גס התעשייתי, דוגמת המגיב הראשון, מתוכנן עבור ביצועים, עם הגדרת מערכת ובחירת רכיבים מודרכים על-ידי דרישות דיוק מיוחדות. חיישנים אינרציאליים איכותיים יותר מאפשרים להם לשחק את התפקיד הראשי, כאשר חיישנים אחרים נאלצים להקטין בזהירות את פער חוסר הודאות. אלגוריתמים ממוקדים יותר בשקילה/מסירה/חציית קשר מיטביים בין החיישנים ביחד עם ערנות על דינאמיקת הסביבה והתנועה בזמן אמיתי, יותר מאשר חיוץ/הערכת מיצוב בין קריאות של חיישנים אמינים (איור 5).
חישוב תעשייתי גס
בכל אחד מהמקרים לעיל ניתן להגביר את הדיוק באמצעות חיישנים באיכות משופרת. אולם, על אף שסינון ואלגוריתמי החיישנים הם חלק קריטי של הפיתרון, הם לא מבטלים לבדם את הפער בכיסוי מחיישנים בעלי איכות מוגבלת.
מערכת מיקום ומיפוי מדויקים (Precision Location and Mapping – PLM)
בשביל המקרה המיוחד של עקיבת תגובה ראשונה, המשימה חולקה לשלבים הבאים כדי להעריך טוב יותר דרישות לעיבוד חיישנים: הגעה לזירה; פריסה; בתוך הבניין; וחילוץ (טבלה 7).
צפוי שמשאית הכיבוי היא מצוידת במערכת GPS/INS איכותית המסוגלת לגיאו-תיקון של מצב ברכב בהגיעו למקום, בתור נקודת יחוס ידועה. מנקודה זו, ועד שהכבאים חודרים אל הבניין, קיים רצף בלתי קבוע ואקראי של תנועה. בשלב זה, מערכת המיצוב והמיפוי המדויקים סומכים על מימוש טיווח רחב-פס ביותר (ultrawideband – UWB) כדי להשיג קביעה מדויקת של מצב וכיוון הכבאים. בשעה שחודרים לתוך המבנה, החיישנים האינרציאליים הופכים לחיישן עקיבה ראשוני, עם המטרה לספק דיוק במיצוב של מטרים אחדים.
המערכת מתוכננת לסמוך על חיישנים אינרציאליים בלבד במידת הצורך, אך גם להיות מסוגלת לנצל אותות מזדמנים אחרים, כאשר הם זמינים ואמינים, כגון אותות טיווח UWB, תיקונים מגנטומטר ומדידות לחץ ברומטרי. האלגוריתמים שמומשו לא רק עוקבים אחרי המקום, אלא יוצרים מפת נתיבים בזמן-אמת של מבנה החיפוש. אם הכבאי יורד או שנמצא במצוקה, המפה שהופרה מהנתיב הראשוני היא מבוא “חיישן” נוסף עבור הכבאי המציל המכוון גם על-ידי חישה אינרציאלית.
בשעה שחיישנים איכותיים הם לבטח בלב מערכת ה-PLM, הנושאים הבאים הם מקיימי המערכת גם כן:
הבנה מעמיקה של חיישני הרכיבים ומאפייני/מגבלות הסחיפה תחת מצבי לחץ
ידע נרחב של דגם תנועת גוף האדם
במבטים מפורטים ברמת היישום והגדרת שיטות התפעול
הנ”ל מספקים את ההגדרה, ההכוונה והגבולות לשם מימוש עיבוד פיוז’ן-החיישן (איור 6).ליבת העיבוד היא מסנן חלקיקים העוקב אחר תנועות אפשריות מרובות במהלך הזמן, תוך ביטול נתיבים מוטעים אשר המסנן מבחין בהם. החיישנים עצמם מחולקים לכבאי למען ביצועים מיוטבים, ורשת גופים אלחוטיים עם רשת תקשורת המחברת ללא תקלות את הכבאי, המציל והפיקוד ובקרה, כמו גם מפות מבוססות עננים ותאום כאשר הדבר אפשרי ושימושי.
מערכת ה-PLM מספקת גישה חופשית מתשתית לשם גילוי המצב, מינוף חיישנים איכותיים ואלגוריתמים מתקדמים כדי לאחד בצורה מיטבית את כל אותות ההזדמנות. מטרות המערכת הן דיוק ברמת המודד והפקת מפות-נתיבים בזמן אמיתי. התקדמויות בחיישנים אינרציאליים MEMS בדרגה תעשייתית אפשרו את ה-PLM, וגישה של פיתוח מערכות מלא מאפשרת לטפל בקשיים טכניים תוך השגת מדידות מסחריות.
עבודות המשך ממוקדות בשילוב של התקדמויות החיישנים מהדור האחרון, והתאמתן למבטים חדשים בהגדרת תרחיש התפעולי של המגיד הראשון. השילוב האחרון יכלול גורמי צורה מיוטבים ומיקום הגוף, כמו גם מימוש שלם יותר של ערוצי התקשורת הדרושים ואישור סופי של המערכת.
