









מנוע צעד הוא בחירה מקובלת לצורך בקרת תנועה מדויקת חכמה. שלא כמו מנוע ז”י רגיל, המיועד לסיבוב רציף, מנוע הצעד מבטיח יכולת סיבוב צעד אחד מסביב לציר. הדבר הופך אותו למנוע המושלם עבור יישומים הדורשים בקרה מדויקת של העמדות והמהירות. עם זאת, כדי להבטיח כי בקרת המנוע תישאר מדויקת בכל נקודות ההפעלה ליישום, חשוב לכוונן את המנוע מול הבקר.
מנוע צעד אופייני מורכב מסטטור, מרוטור המחובר לגל ומכמה כריכות סליל היוצרות שדות מגנטיים בעמדות קבועות מסביב לסטטור. במנוע צעד בעל מגנט קבוע (permanent-magnet), הרוטור משתמש בדיסק קטן מחומרים מגנטיים. הדיסק יכול להיות בעל שני קטבים בלבד. דיסק מורכב יותר, המשמש בדרך כלל במנועי דיוק (precision), יכול ליצור שדות שזורים רבים סביב חלקו החיצוני. לעומת זאת, מנוע צעד בעל מיאון מגנטי משתנה (variable-reluctance) הנו אלקטרומגנטי לחלוטין.
כאשר מנתקים את המתח למנוע, הוא אינו מתנגד לסיבוב הציר בכוח חיצוני.
-
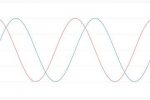
- איור 1. זוג צורות גל סינוסואידליות בצעידה עבור מיקרו-צעידה
-
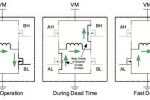
- איור 2א: זרם גשר-H עבור מצב דעיכה מהירה (תמונה באדיבות Texas Instruments)
במנוע מגנט קבוע, כאשר מפעילים כוח על המנוע, הרוטור מנסה להגיע לעמדה היציבה ביותר האפשרית. השדה האלקטרומגנטי שמחולל הסליל ימשוך קוטב אחד של המגנט המובנה ברוטור וידחה את הקוטב האחר. כאשר הקוטב הנגדי הקרוב ביותר בדיסק מתיישר עם השדה האלקטרומגנטי שמחולל הסליל, הרוטור יעצור ויישאר קבוע בעמדה זו כל עוד שדה הסליל נשאר ללא שינוי. אם מנתקים את הזרם לסליל זה ומעבירים אותו לסליל אחר בעמדה אחרת, המגנטים יימשכו לעמדה היציבה הבאה שבה הרוטור יכול להגיע לעצירה פעם נוספת.
בדרך כלל, מנוע מיאון מגנטי משתנה משתמש בכמה סלילים בסטטור, כשהם מסודרים בזוגות נגדיים. מנוע תלת-פאזי כולל שלושה זוגות כאלה. הספקת זרם לכל זוג סלילים בתורו מעבירה את הרוטור המתכתי מצעד לצעד.
עקב מגבלות מכניות, הרוטור יכול להסתובב לפי דרישה בלבד ועד למהירות מרבית מסוימת. בדרך כלל, מומנט המנוע מוגדל במהירויות נמוכות. עקב כך, פעמים רבות נעשה שימוש במנועים כאלה במהירויות נמוכות, דבר המבטיח בקרה ומומנט מרביים.
ניתן להגדיל את כושר ההפרדה באמצעות מיקרו-צעידה (microstepping). בהפעלה רגילה, הזרם מסליל אחד אינו מנותק לחלוטין לפני הפעלת הסליל הבא. במקום זאת, הזרם מופחת בסליל אחד ומוגבר בסליל הבא. אם שיתוף הזרם מבוקר על פני שני הסלילים, הדבר מבטיח צעדים וירטואליים קטנים יותר לעומת מצב שבו מנסים להניע את המנוע באמצעות מעברי זרם בדידים.
עקרונית, שני אותות סינוסואידליים שכל אחד מהם מוסט פאזה ב-90° מהאחר, יכולים ליצור תנועה רציפה חלקה. בפועל, צורות הגל אינן סינוסואידליות לחלוטין – הזרם עבור הסליל בכל אחת מהעמדות הנו ברמה בדידה. בדרך זו, המיקרו-צעידה יוצרת תנועה חלקה יותר ויכולה לסייע להפחית רעשים ורעידות במנוע לעומת הסטה בין צעדים מלאים. עם זאת, שליטה מדויקת בזרם המנוע חשובה כדי לקיים בקרה מדויקת, במיוחד במצבי נפילת זרם במהירויות נמוכות – כיוון שהמנוע יכול להחמיץ מיקרו-צעדים באופן אקראי.
בדרך כלל, רמות הזרם הספציפיות נוצרות בשיטות לקיטום של אפנון רוחב מתקף (PWM). גשר-H של שני זוגות טרנזיסטורי הספק מעביר את הזרם הקטום לסלילי המנוע. בדרך כלל, זרם הדחיפה נקטע כאשר הזרם הקטום מגיע לסף עבור מיקרו-צעד זה. לאחר נקודה זו, הזרם יתחיל לדעוך. הפרופיל של דעיכה זו יהיה תלוי בפעולת גשר ה-H.
במצב דעיכה איטית, הזרם מוזרם מחדש באמצעות זוג טרנזיסטורי ההספק של הצד הנמוך. החיסרון של מצב זה הוא שהדעיכה האיטית יכולה להגביל את כמות הזרם המחייב ויסות לצורך הנעת המנוע. מצב דעיכה מהירה משתמש בגשר-H כדי להפוך את המתח על פני כריכת הסליל, דבר הגורם לנפילת זרם בקצב מהיר. עם זאת, הדבר יכול לגרום לזרמי אדווה חזקים אשר יגרעו מן היעילות ועלולים שלא להתאים לרמות זרם גבוהות העשויות להידרש על ידי המנוע המונע.
מצב דעיכה מעורבת מייצג שילוב של שני מצבי הדעיכה. מצב זה מתחיל בדעיכה מהירה, ולאחר פרק זמן קבוע עובר לדעיכה איטית. הדבר מאפשר את רוב מצבי המיקרו-צעידה אבל מחייב כי אלגוריתם הבקרה יהיה מותאם באופן מיטבי למנוע הספציפי שבשימוש. הכוונון תלוי בסדר הגודל של זרם העומס, מתח ההזנה וקצב הצעידה. בדרך כלל, זרמי עומס נמוכים דורשים תמהיל שונה של דעיכה מהירה ואיטית לעומת זרמי עומס גבוהים.
-
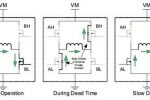
- איור 2ב: זרם גשר-H עבור מצב דעיכה איטית (תמונה באדיבות Texas Instruments)
-
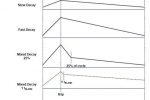
- איור 3: מצבי דעיכת זרם איטית, מהירה ומעורבת (תמונה באדיבות Texas Instruments)
באופן מסורתי, השיטה הטובה ביותר מאותרת על ידי מחזור דרך יחסי הדעיכה הקבועה ובחינת פרופיל הזרם באמצעות אוסילוסקופ עבור כל רצף מיקרו-צעידה נתון. הבעיה המרכזית עם שיטות של דעיכה קבועה היא שהן אינן מגיבות לשינויים בתנאים. פרמטרים כמו הכוח האלקטרו-מניע (EMF) החוזר וקצב המיקרו-צעידה, המשפיעים על רמת המתח והזרם באופן דינמי, יכולים להשתנות בשעת פעולה.
מיטוב לצורך קצב צעידה גבוה, המושג בדרך כלל על ידי יישום יחס גבוה יותר של דעיכה מהירה-איטית, יכול לגרום לאדווה מופרזת של הזרם כשהמנוע שוהה בצעדים עצמם או נע באיטיות ביניהם. אם המערכת מופעלת בסוללה, המתח שזו מספקת יפחת עם היחלשותה – ואם הדבר אינו מווסת, הוא יגרום להזנת מתח בתנאים משתנים מבחינת המנוע. כמו כן, ככל שהמנוע מתיישן, פרופיל הדעיכה הראשוני עשוי להפוך לא מתאים יותר ויותר.
הפתרון הוא לאמץ אלגוריתמים המסתגלים לתנאים המשתנים במנוע. פקודות הצעידה והתנהגות ה-PWM יכולים לשמש כהנחיה למקום שלגביו תוגדר נקודת הסבת הדעיכה לפי כל צעד. בכל מחזור PWM הבקר ימתג את גשר ה-H בנקודה נתונה. כוונון מסתגל ‘זוכר’ את התזמון של מיתוג זה ומשתמש בו כדי לקבוע את יחס הדעיכה המהירה-איטית עבור הצעד הבא.
על ידי ניטור פקודות הצעידה – תוך בדיקה אם המנוע נע מהר או לא – אחוז הדעיכה המהירה יהיה ניתן להגדלה והקטנה לפי דרישת המנוע. עם האטת המנוע, גודל אחוז הדעיכה המהירה יהיה ניתן לשינוי בחזרה.
ניתן לשלב אלגוריתמים כאלה בקושחת מיקרו-בקר, אך הם זמינים גם בבקרי מדף של מנועי צעד, כמו Texas Instruments DRV8846. שיטת הדעיכה המסתגלת המשמשת בבקר DRV8846 מפצה אוטומטית על מתח ההזנה, השראות העומס, התנגדות העומס, הכוח האלקטרו-מניע החוזר וסדר הגודל של הזרם.
על ידי שימוש בדעיכה מסתגלת, ה-DRV8846 כבר אינו זקוק לפיני הבקרה המשמשים לקביעת יחס הדעיכה באופן רגיל, דבר המסייע לחסוך בעלות החבילה. יתרה מזו, האלגוריתם מתוכנן כך שישתמש כמה שיותר דווקא בדעיכה איטית, וכך מושגת יעילות הספק גבוה יותר. הדבר נובע מכך שהזרם עובר רק דרך זוג טרנזיסטורי ההספק של הצד הנמוך, ובדרך כלל הדבר יעיל יותר ממיתוג גשר ה-H לתצורה הפוכה.
שיטה המופעלת בהתקן אחר בעל בקרת דעיכה מסתגלת – ה-STMicroelectronics L6472 – היא ניטור של אות הסבת ה-PWM בצעדים עולים ויורדים, כדי לקבוע אם הדבר מתרחש לפני או אחרי זמן מזערי מוגדר בכל מיקרו-צעד. אם סף זרם היעד מושג לפני אותו זמן מזערי, משתמשים בדעיכה מהירה במקום בדעיכה האיטית הרגילה עד לנקודה מסוימת, הנקבעת לפי זמן דעיכה מהירה מרבי מתוכנת. אם נתקלים בשני מצבי דעיכה מהירה במהלך שורה של צעדים עולים, האלגוריתם ימשיך להזרים אותם עד לעצירת המנוע או עד לחציית האפס של גל הסינוס.
בצעדים נופלים, האלגוריתם של ה-L6472 ישתמש תחילה בדעיכה מהירה ולא בדעיכה איטית במטרה להשיג את רמת היעד מהר ככל האפשר. אולם לאורך זמן, ובמטרה למנוע היווצרות של זרמי אדווה חזקים, האלגוריתם יותאם להגדלת סף הדעיכה המהירה – דבר שיגרום למעבר אל מצב דעיכה איטית אלא אם שינויי הביקוש לזרם ישתנו מספיק כדי לחייב דעיכה מהירה. התוצאה היא איזון מתמשך של מצב זה ומצבי דעיכה איטית.
הודות לשיטות חכמות יותר ליישום דעיכת זרם בסלילי מנוע צעד, ניתן לנצל את פרופיל התנועה החלק יותר של המיקרו-צעידה ולהבטיח כי המנוע מגיב היטב לשינויים במתח, לתנאי ההפעלה ואפילו להתיישנות.
