















בקרה נטולת חיישנים (FOC) למנועים חסכוניים באנרגיה
ישנם שני גורמי מניעים עיקריים מאחורי אימוץ מערכות בקרת מנועים מתקדמות שמבוססות על מנועים סינכרוניים מגנטיים קבועים (PMSM) עם שליטה ללא חיישנים (FOC): שיפור היעילות האנרגטית וחיזוק בידול המוצר. בעוד שהוכח כי PMSM עם FOC נטול חיישנים משיג את שתי המטרות, ההצלחה דורשת מערכת אקולוגית עיצובית שמספקת גישה הוליסטית להטמעה. מערכת אקולוגית הוליסטית תאפשר למעצבים להתגבר על אתגרי ההטמעה שמפריעים לאימוץ שלה.
מדוע PMSM?
מנוע PMSM הוא מנוע ללא מברשות שמשתמש בהנעה חשמלית. לעתים קרובות מתבלבלים בינו לבין מנוע DC ללא מברשות (BLDC) – חבר נוסף במשפחת המנועים נטולי המברשות שמשתמשים בהנעה חשמלית אך יש ביניהם הבדלים קלים בבנייה. בניית PMSM מותאמת ל-FOC, בעוד שמנוע ה-BLDC מותאם לשימוש בטכניקת החלפה בת 6 שלבים. הייעול גורם לכך של-PMSM יש כוח אחורי-אלקטרומטיבי בעקומה עולה ויורדת (Back-EMF), ולמנוע BLDC יש EMF אחורי טרפזי.
גם חיישני מיקום הרוטור שמשמשים את כל אחד מהמנועים הללו שונים. PMSM משתמש לרוב במקודד מיקום בעוד מנועי BLDC משתמשים בשלושה חיישני Hall להפעלה. אם יש חשיבות גבוהה לעלות, מעצבים יכולים לשקול הטמעת טכניקות נטולות חיישן שמבטלות את עלות המגנט, החיישנים, המחברים והחיווט. ביטול החיישנים משפר גם את האמינות מכיוון שבמערכת יהיו פחות רכיבים שעלולים לכשל. כשמשווים PMSM ללא חיישן ל-BLDC ללא חיישן, ה-PMSM ללא חיישן באמצעות אלגוריתם FOC מספק ביצועים טובים יותר תוך שימוש בעיצוב חומרה דומה בעלות הטמעה דומה.
האפליקציות שירוויחו הכי הרבה ממעבר ל-PMSM הן אלה שמשתמשות כיום ב-DC מוברש (BDC) או במנוע אינדוקציה מסוג AC (ACIM). היתרונות העיקריים של מיתוג כוללים צריכת חשמל נמוכה יותר, מהירות גבוהה יותר, מומנט חלק יותר, רעש נמוך יותר, תוחלת חיים ארוכה יותר ומידות קטנות יותר, דבר שהופך את היישום לתחרותי יותר. עם זאת, כדי לממש את היתרונות הללו משימוש ב-PMSM, המפתח צריך להטמיע את טכניקת הבקרה FOC המורכבת יותר יחד עם אלגוריתמים אחרים ספציפיים ליישום כדי לעמוד בדרישות המערכת. למרות ש-PMSM יקר יותר בהשוואה ל-BDC או ל-ACIM, הוא מציע הרבה יותר יתרונות.
אתגרי הטמעה
מימוש היתרונות של שימוש ב-PMSM, לעומת זאת, דורש הבנה של מורכבות החומרה הגלומה בהטמעת טכניקת בקרת מנוע FOC מתקדמת, ונדרשת מומחיות בתחום. איור 1 מציג מערכת בקרת PMSM תלת פאזית ללא חיישן שעושה שימוש בממיר מתח תלת פאזי. שליטה בממיר המתח דורשת שלושה זוגות של אותות PWM ברזולוציה גבוהה שמקושרים זה לזה והרבה אותות משוב אנלוגיים שדורשים מיזוג אותות. המערכת דורשת גם תכונות הגנה על חומרה לעמידות בתקלות, שתוכננו באמצעות כלי השוואה אנלוגיים במהירות גבוהה לקבלת תגובה מהירה. הרכיבים האנלוגיים הנוספים הללו שנדרשים עבור חישה, שליטה והגנה מעלים את עלות הפתרון והם אינם נדרשים לעיצוב מנוע BDC טיפוסי או לבקרת וולטים להרץ (V/F) פשוטה ב-ACIM.
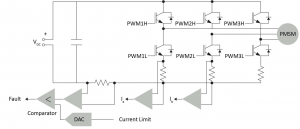
איור 1
ישנו גם זמן הפיתוח שנדרש להגדרה ואימות של מפרט הרכיב ליישום בקרת המנוע PMSM. כדי להתמודד עם האתגרים האלה, מעצבים יכולים לבחור מיקרו-בקר שמציע אינטגרציה אנלוגית גבוהה עם מפרט המכשיר שמותאם לבקרת מנוע PMSM. הדבר יקטין את מספר הרכיבים החיצוניים הנדרשים ויפחית את עלות החומרים (BOM). התקני בקרת מנועים משולבים מאוד זמינים כעת עם PWMs ברזולוציה גבוהה כדי להקל על הטמעת אלגוריתמים מתקדמים לבקרה, ציוד היקפי אנלוגי במהירות גבוהה למדידה מדויקת ומיזוג אותות, ציוד היקפי לחומרה שנדרש לבטיחות תפקודית וממשקים סדרתיים לתקשורת וניפוי באגים.
האינטראקציה בין תוכנת הבקרה המנועית לבין ההתנהגות האלקטרו-מכאנית של המנוע מאתגרת לא פחות. איור 2 מציג את תרשים בלוק ה-FOC הסטנדרטי ללא חיישן. העברתו מקונספט לעיצוב בפועל דורשת הבנה של ארכיטקטורת הבקר ושל הוראות מעבד האותות הדיגיטליים (DSP) להטמעת לולאות בקרה שתלויות בזמן עם מתמטיקה אינטנסיבית.
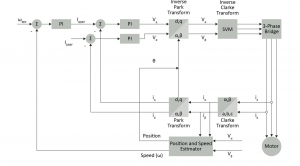
איור 2
כדי להשיג ביצועים אמינים, לולאת הבקרה חייבת להתבצע בתוך תקופת PWM אחת. ישנן שלוש סיבות שמחייבות את ייעול הזמן של לולאות הבקרה.
1) מתוך אילוץ: השתמש בתדר מיתוג PWM במהירות של 20 קילו-הרץ או גבוהה יותר (50 מיקרו-שניות) כדי להעלים את הרעש האקוסטי מהחלפת ממיר המתח.
2) כדי להשיג מערכת בקרה ברוחב פס גבוה יותר, לולאת הבקרה חייבת להתבצע בתוך תקופת PWM אחת.
3) כדי לתמוך במשימות רקע אחרות כגון ניטור מערכת, פונקציות ספציפיות ליישומים ותקשורת, לולאת הבקרה חייבת לפעול אפילו מהר יותר. כתוצאה מכך, אלגוריתם ה-FOC צריך לשאוף לביצוע בפחות מ-10 מיקרו-שניות.
יצרנים רבים מספקים תוכנת FoC לדוגמא עם אומדנים נטולי חיישן למיקום הרוטור. עם זאת, לפני שהוא יוכל להתחיל לסובב את המנוע, אלגוריתם ה-FOC חייב להגדיר פרמטרים שונים שיתאימו למנוע ולחומרה. נחוצה אופטימיזציה נוספת של הפרמטרים והמקדמים של הבקרה כדי לעמוד ביעדי המהירות והיעילות הנדרשים. הדבר מושג באמצעות שילוב של: 1) הפקת הפרמטרים באמצעות גליון הנתונים של המנוע ו-2) ניסויים בשיטת ניסוי וטעייה. מפתחים יצטרכו לנקוט בשיטת ניסוי וטעייה כשהפרמטרים המוטוריים עשווים שלא להיות מאופיינים במדויק בגיליון הנתונים של המנוע, או כשלמעצבים אין גישה לציוד מדידה ברמת דיוק גבוהה. תהליך הכיוון הידני הזה דורש זמן וניסיון.
מנועי PMSM משמשים ביישומים רבים ושונים, שפועלים בסביבות שונות או באילוצי עיצוב שונים. לדוגמה, במאוורר של רדיאטור לרכב, יתכן כי להבי המאוורר מסתובבים בחופשיות בכיוון ההפוך בגלל רוח כשהמנוע עומד להתניע. הפעלת מנוע ה-PMSM עם אלגוריתם נטול חיישנים בתנאי זה מהווה אתגר והיא עלולה לפגוע בממיר המתח. אחד הפתרונות הוא זיהוי כיוון הסיבוב ומיקום הרוטור ושימוש בנתונים האלה כדי להאט את המנוע לעצירה מוחלטת באמצעות בלימה פעילה לפני התנעת המנוע. באופן דומה, ייתכן שיהיה צורך להטמיע אלגוריתמים נוספים כגון מומנט מרבי לכל אמפר (MTPA), פיצוי מומנט והחלשת שדה [1] וכו’. סוגי תוספי האלגוריתמים הספציפיים הללו ליישומים נחוצים כדי לפתח פתרון מעשי, אך הם מוסיפים למורכבות העיצוב בשל הגדלת זמן הפיתוח והפיכת אימות התוכנה למורכב יותר.
אחד הפתרונות לצמצום המורכבות עבור המעצבים הוא יצירת ארכיטקטורת תוכנה מודולרית שמאפשרת להוסיף את האלגוריתמים הספציפיים ליישום לאלגוריתם ה-FOC מבלי להשפיע על הביצוע שתלוי בזמן. איור 3 מציג את ארכיטקטורת התוכנה של אפליקציית בקרת מנוע אופיינית בזמן אמת. בלב המסגרת נמצאת פונקציית FOC, שלה אילוץ תזמון קשה והרבה פונקציות ספציפיות ליישום. מכונת מצבים בתוך המסגרת מממשקת את פונקציות הבקרה הללו עם היישום הראשי. הארכיטקטורה זקוקה לממשק שמוגדר היטב בין בלוקים של פונקציות תוכנה כדי להפוך אותה למודולרית ולהקל על תחזוק קוד פשוט. מסגרת מודולרית תומכת באינטגרציה של אלגוריתמים ספציפיים ליישומים יחד עם ניטור המערכת, הגנה ורוטינות בטיחות פונקציונלית אחרות.
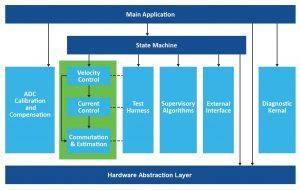
איור 3
יתרון נוסף של ארכיטקטורה מודולרית הוא הפרדה של שכבת הממשק ההיקפי (או שכבת הפשטת החומרה) מתוכנת הבקרה המוטורית, שמאפשרת למעצבים להעביר את ה-IP שלהם בצורה חלקה מבקר מנוע אחד לאחר כשתכונות היישום ודרישות הביצועים משתנות.
דרישה למערכת אקולוגית מלאה
ההתמודדות עם אתגרים אלה דורשת מערכת בקרה מוטורית אקולוגית שמותאמת לעיצובי FOC ללא חיישן. בקר המנוע, החומרה, התוכנה וסביבת הפיתוח צריכים לפעול יחד כדי לפשט את תהליך הטמעת האלגוריתמים המתקדמים לבקרת מנועים. כדי להשיג זאת, התכונות הבאות חייבות להיות במערכת האקולוגית:
- כלי ברמה גבוהה לאוטומציה של מדידת פרמטרים מוטוריים, עיצוב לולאות בקרה ויצירת קוד מקור, מאפשר למעצבים ללא מומחיות בתחום להטמיע בקרת מנוע FOC, לכתוב קוד מורכב שתלוי בזמן ולבצע בו ניפוי באגים, פעולות שאורכות זמן רב
- מסגרת יישומים עבור FOC ותוספי אלגוריתמים ספציפיים ליישומים מפחיתה את זמן הפיתוח והבדיקה
- בקרי מנוע עם תגובה דטרמיניסטית וציוד היקפי אנלוגי משולב עבור מיזוג אותות והגנה על המערכת בשבב יחיד מפחיתים את עלות הפתרון הכוללת
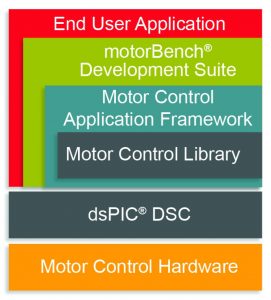
איור 4
איור 4 מציג דוגמה לארכיטקטורה של מערכת אקולוגית לבקרה מוטורית שכוללת את מסגרת היישומים וחבילת פיתוח לבקר מנוע dsPIC33 בעל ביצועים גבוהים עם בקר אותות דיגיטליים (DSC). חבילת הפיתוח בנויה סביב כלי פיתוח התוכנה FOC על בסיס GUI שיכול למדוד פרמטרים במנוע קריטיים ולכוון את רווחי בקרת המשוב באופן אוטומטי. בנוסף, הוא יוצר את קוד המקור הנדרש לפרויקט שנוצר בסביבת הפיתוח תוך שימוש במסגרת יישום בקרת מנוע (MCAF). במרכז חבילת הפתרונות ניתן למצוא את ספריית בקרת המנוע, שמאפשרת להטמיע את פונקציות לולאת הבקרה התלויות בזמן של היישום ולקיים אינטראקציה עם הציוד ההיקפי המוטורי של dsPIC33 DSC. ה-GUI זה פועל יחד עם מספר לוחות פיתוח לבקרת מנועים כדי לתמוך בחילוץ פרמטרים מהמנוע ויצירת קוד FOC למגוון רחב של מנועי LV ו-HV.
המעבר למנועים ללא מברשת נוצר כתוצאה מהצורך ביעילות אנרגטית גבוהה ובידול המוצר. מערכת אקולוגית מלאה לבקרת מנוע מספקת גישה הוליסטית לפישוט ההטמעה של FOCS ללא חיישן עם PMSM, והיא חייבת להיות מורכבת מבקרי מנוע ייעודיים, לוחות פיתוח מהירים של אבי טיפוס ותוכנה פיתוח פשוטה מסוג FOC עבור האוטומציה של יצירת הקוד.
הפניות
[1] בקרת TB3220 ללא חיישנים בשדה מנוע סינכרוני מגנטי קבוע (פני השטח והחלק הפנימי) למכשירי חשמל עם מעריך לולאה עם פאזה נעולה ומעקב אחר זוויות
[2] מערכת פיתוח ®motorBench
https://www.microchip.com/design-centers/motor-control-and-drive/motorbench-development-auto-tuning
[3] משאבי תכנון לבקרת מנוע
https://www.microchip.com/design-centers/motor-control-and-drive
