















הסבר כיצד להשלים תכנון וניתוח זול תוך שימוש במנוע השראה AC חד-מופעי ומיקרו-בקר 8 ביט ביישום של דלת מוסך.
למנועי השראה AC קטנים, לדוגמה כאלה לשם פתיחת דלתות מוסך, ניתן להוסיף בקרת מהירות ותחילה רכה בעלות נמוכה תוך שימוש במעגל מהפך תלת-מופעי. מנועים בעלי קבל מפוצל קבוע (permanent split capacitor) הם בין הפשוטים והשימושיים ביותר עבור סוג זה של יישום. יש להם מומנט סיבוב וזרם נמוכים, אך הם יכולים להיות לא-יעילים בשל קבל הריצה הלא-מקוטב, הכושל לעתים קרובות לפני שאר המנוע.
מנועים חד-מופעיים אלה מכונים לעתים קרובות בתור מנועים דו-מופעיים מאחר שהם לא יכולים לפעול ללא סטיית מופע מספקת בין שני הליפופים. הקבל ממוקם בין אות המבוא והליפוף כדי ליצור סטיית מופע של בערך 900.
המתג מוחלף לעתים קרובות בממסר שיכול לבקר את הכיוון בעזרת חילופין של המופע המוליך או המפגר אחרי השני. ערך הקבל מצוין אופיינית על-ידי יצרן המנוע והוא לעתים בתחום בין 5 ל-50µF עבור מנועים שהם פחות מ-0.75kW, מהסוג הנדון כאן. יש לבחור את הקבל בזהירות כדי לתקן את גורם ההספק לשם יעילות הספק מרבית. איור 1 מראה את הטופולוגיה של מנוע השראה AC מסורתי.
דירוג המתח הוא לרוב גבוה בסביבת 220 עד 450 וולט, תלוי במתח המבוא. הקבל לא צריך להיות מקוטב, מאחר שהוא נמצא על-פני מתח חילופין. אם קבל זה כושל, המנוע יחדל מלהסתובב. לכן חשיבות בחירת הקבל הנכון היא קריטית. לקבל מעשי יש התנגדות והוא מקרין חום בשעה שהוא צורך את זרם האדווה (ripple) בתוך ההתנגדות הטורית שוות-הערך שלו. הקבל המותקן קבוע מחליף את יכולת מומנט הסיבוב ההתחלתי במצב עצירה עם הקטנת סיבוב האדווה במהירות הריצה. בשל דירוג ה-VA הגבוה של הקבל, הוא נבחר לעתים קרובות כדי למלא אחר דרישות ביצועי ההתחלה המזעריים, היוצרים יעילות הפעלה נמוכה.
לגבי מנועים שאין להם ליפופים זהים, חובה להזין את שני המופעים במתחים שונים. אסימטריה זו נגרמת בשל נוכחות הקבל, היוצר מעגל תהודה עם השראות המנוע. כתוצאה, דבר זה מעלה את המתח על-פני אחד הליפופים וגורם לזרימה בלתי-אחידה של הזרם.
אולם, ניתן להשתמש במהפך תלת-מופעי כדי להחליף את הקבל הקבוע, כמתואר באיור 2. דבר זה מאפשר כוונון של מהירות המנוע בעזרת הכמות המתאימה של מתח המוזן על כל ליפוף כך שהליפופים החלשים יותר לא יהיו מועמסים יתר על המידה.
המנוע עדיין יסתובב ללא הקבל אם הסלילים מוזנים מחוץ למופע אחד מהשני. דבר זה ניתן להשיג על-ידי יצירת שלושה מופעים בתוכנה. ניתן לייחס את שלושת המתחים התלת-מופעיים הללו אחד מהשני כדי ליצור כתוצאה שתי צורות גלים על-פני שני הליפופים של המנוע. אחד המופעים נלקח כייחוס, או ניוטרלי, כדי ליצור את שתי צורות הגלים. ניתן ליצור את שלושת המופעים בתוכנה תוך שימוש בטכניקות PWM.
השוואה
ניתן להריץ שלוש בדיקות כדי להשוות את שיטת ההרצה PSC עם שיטת המהפך ללא קבל הרצה. אלו הן: מומנט-סיבוב כדי לאפיין את ההשפעות של הזנת תדר משתנה על המנוע; תאוצה ומהירות כדי לזהות איזו שיטה מסובבת את ציר המנוע מהר ביותר וכמה מהר העומס יואץ; ויעילות כדי להשוות את הרכיב הממשי של הספק המוצא להספק המבוא ולמדוד את מקדם ההספק ואי-יעילויות אחרות.
שלוש בדיקות אלו מכסות את שיקולי התכנון הגדולים ביותר בבקרת מנועים. אף אחת מהבדיקות אינה דורשת מערך מיוחד מבדיקות אחרות. כל ניתוח בשלוש הבדיקות הנפרדות יכול להשתמש באותה תת-קבוצה של נתונים. מערך הבדיקה מוצג באיור 3.
בדיקה זו השתמשה במנוע חד-מופעי של 0.19kW עם תצורת חיווט מאוזנת. לשני הליפופים יש התנגדות והשראות זהות. חיישן תופעת Hall שימש למדידת מהירות הציר. המבוא היה 220 וולט, חד-מופעי, דו-מוליכי. המוצא הוזן אל שני המגעים של המהפך.
ממשק ה-PC רץ על תוכנת M-Test 7 של Magtrol. הבקר המיתכנת העביר את מערך הבדיקה מתוכנה זו אל הדינמומטר וקרא את מומנט הסיבוב המופעל. נתח ההספק ביצע ואגר את כל הקריאות האחרות. החל מבדיקת מומט הסיבוב, היה ברור שלמנוע מומנט סיבוב התחלתי הגבוה ביותר של כ-0.75Nm בין 50 ו-60 הרץ בהתאם לתכנון המנוע. לתדרים מעל ומתחת ל-60 הרץ היו פרופילי מומנט סיבוב נמוכים יותר. אולם, הקריאות בתדרים נמוכים לא יצרו עקומת מומנט סיבוב קבועה. תדרים מתחת ל-60 הרץ דרשו כוונון עדין של היחס מתח-תדר בשל ההפסדים במנוע או אי-הדיוקים בהזנת המנוע. תדרים מתחת ל-60 הרץ נשמרו במתח מרבי.
תדר נמוך גורם להפחתה בעכבת סליל ההשראה. המתח הגבוה המסופק לעכבה מופחתת זו מעלה את הזרם בסטטור, היוצר מומנט סיבוב גבוה יותר. הכוונון העדין דרוש כדי ליצור עקומת מומנט סיבוב ליניארית.
צורות העקומות שונות מאוד בין שתי השיטות. שיטת הקבל מראה מומנט סיבוב התחלתי מעט גדול יותר ותאיץ מהר יותר מאשר כרטיס המהפך ב-60 הרץ. כרטיס המהפך יוצר עקומה דומה לזו של מנוע מתוכנן מסוג D, בעוד טופולוגיית הריצה של ה-PSC יוצרת עקומת מומנט סיבוב מסוג A דומה. גודל המתח הבלתי-אחיד הנוצר על-ידי הקבל הקבוע יוצר גודל בלתי-אחיד של שטף ממגנט בתוך הסטטור. כרטיס המהפך שואף ליצור כמות שווה של זרם בכל ליפוף, מאחר שלמנוע מסוים זה יש עכבה זהה בכול אחד מהם. צורות עקומות מומנט הסיבוב אינן דומות בשל ההבדלים בטופולוגיית ההזנה. המהפך לא יוכל להרים אות עומס כמו בשיטת ה-PSC כאשר מסתכלים במומנט הסיבוב כאשר הרוטור נעול אם המהפך היה מתוכנת פשוט לסובב את המנוע בתדר אפנון של 60 הרץ. אולם, כרטיס המהפך יכול להשתמש בהזנת תדר משתנה כדי להרים אף עומס גדול יותר. המתכנן צריך גם להביא בחשבון את הפשרות של מומנט סיבוב התחלתי גדול לעומת יעילות ומהירות.
היתרון הבולט ביותר של בקרת המתח והתדר הוא בכך שהמתכנן יכול לבקר את המהירות בה ציר המנוע מסתובב. ככל שהוא מסתובב מהר יותר, מוקדם יותר ניתן יהיה לדחוף או למשוך את העומס אל היעד שלו. זה עשוי להיות רווח תכנוני קריטי ביישום של דלת מוסך או מערכת פתיקה (gating).
כרטיס המהפך
אם כן, כרטיס המהפך מאפשר למנוע להשיג מנוע דומה המוזן על-ידי שיטת ה-PSC. שיטת ה-PSC ניתנת להזנה רק בתדר אחד ולכן, היא לא יכולה לעבור מעל מהירות הסנכרון שלה.
כרטיס המהפך ניתן לבנייה כפלטפורמה מיוחדת-ליישום ולא ככרטיס תצוגה בעל משימה כללית. אולם, הוא מספק מבואות ומוצאים רבים (I/O) עבור המשתמש כדי להתערב בו ולשנותו. המהפך מהונדס כדי להזין מנוע השראת AC חד-מופעי או תלת-מופעי. מבט כללי של הכרטיס מוצג באיור 4 תוך שימוש במיקרו-בקר PIC16F1509 של Microchip.
הכרטיס תוכנן תוך שמירה על הגמישות, כך שאחדות מתכונותיו ניתנות לשימוש או לא כדי להשיג ייטוב. רוב ה-I/O משמשים כצופן של ברירת מחדל אך עדיין יש למפתח מקום נרחב לשם שימוש בשינויים של המשתמש. קווי ה-I2C הם גם פתוחים לכל התקן-שיעבוד מוסף.
חלק מה-I/O מרובבים אל פין יחיד כדי להגדיל את מספר ה-I/O שניתן להשתמש בהם. כל דרישות ממשק המשתמש מבודדות דרך שני מצמדים אופטיים בעלי ארבעה ערוצים ומצמד אופטי חד-ערוצי.
הכרטיס מספק שני לחצני מיתוג ושני פוטנציומטרים. ישנן גם כותרות (headers) המספקות חיבורים עבור I/O חיצוניים, כגון חיישני תנועת דלתות המוסך. הטרנזיסטור של שני הפוטנציומטרים עבר מיקדם (bias) באזור ההגברה שלו. המוצא הוא לכן בערך ליניארי, מאחר של-LED המצמד האופטי אין עקומת I-V ליניארית. זרמים גדולים בתחום ה-30 מילי-אמפר נצרכים עבור כל פוטנציומטר.
ללחצנים הדיגיטליים והמבואות הנוספים יש מיקדם כדי ליצור פסק בהחלפה
(interrupt-on-change – IoC) כאשר משתמשים באחד מהם. דבר זה חוסך על ה-CPU מלבדוק את רמת המתח על הפינים. כאשר מגלים IoC, יש לקחת קריאת ADC כדי לקבוע איזה מבוא גרם לפסק.
הפעלה
המנוע נמצא במצב הסרק שלו כאשר המיקרו-בקר PIC16F1509 מתחל את הפינים ועוצר את המנוע. כאשר לוחצים על לחצן ההתחלה, המנוע מופעל תוך שימוש בשיטת ההתחלה הרכה (soft-start) כאשר התדר והמתח מכוונים בצורה ליניארית כדי להביא את המנוע באיטיות למצב הפעולה שלו. המנוע יפעל כשורה כאשר פעולת ההתחלה הרכה הושלמה.
נקודות מהירות המנוע ועצמות הזרם נאגרות בקביעות בלולאה הראשית. אם מתגלה זרם-יתר, המנוע מופסק ו-LEDs המצב מהבהבים כדי להצביע על תקלה. המנוע מופסק בד”כ על-ידי לחצן תוך שימוש בבלימה או בעצירה רכה כדי להחזיר אותו למצב הסרק.
סיכום
ניתן להזין מנועי השראה AC דוגמת אלה המשמשים ביישומי דלתות מוסכים תוך שימוש בכרטיס מהפך במקום הקבל המסורתי. דבר זה מאפשר להוסיף למנוע בקרת מהירות ויכולות התחלה רכה בעלות נמוכה יחסית. כרטיס המהפך מבוסס על מיקרו-בקר 8 ביט PIC16F1509 של Microchip.
הכתבה נמסרה באדיבות חברת Microchip.
-
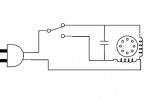
- איור 1. טופולוגיה של מנוע השראה AC מסורתי; הקבל מספק את סטיית המופע החיונית כדי ליצור שדה מגנטי מסתובב
-
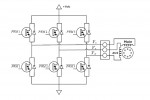
- איור 2. מהפך חד-מופעי עם שלושה חצאי-גשרים; שישה אותות PWM משמשים כדי להזין את המנוע PSC כלוב-סנאי
-
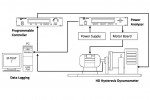
- איור 3. מערך בדיקה בעזרת דינמומטר
-
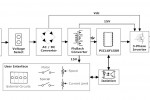
- איור 4. מבט-על של המערכת השלמה
