














 מאת: ד”ר ג’ון דאן,AWR Corporation, בני חדד, חברת רדט ציוד ומערכות.
מאת: ד”ר ג’ון דאן,AWR Corporation, בני חדד, חברת רדט ציוד ומערכות.
תהליך ה – De-Embedding הינו תהליך אשר בו מתקיימת הסרת הפרזיטיות מן ה – Port. זאת משום שלכל Port ישנה פרזיטיות. דרך נוספת לתאר זאת תהיה: אף port אינו מושלם… מטרתו המוצהרת של תהליך ה – De-Embedding הינה להפוך את ה – Port למקור מושלם ככל הניתן, היינו ללא פרזיטיות. הרעיון נשמע טוב, אך יש מספר צדדים למטבע… לצערנו, תהליך ה – De-Embedding מניח מספר הנחות היכולות להוביל למצב של תוצאות שגויות אם הנחות אלו אינן מובנות היטב או נסתרות. כתוצר לוואי, תהליך ה – De-Embedding משמש גם עבור יצירת משטח ייחוס או קו ייחוס לבחירתו של המשתמש.
בכדי להבין את תהליך ה – De -Embedding, נתאר את התהליך המקביל המתרחש במעבדה. הסימולציה האלקטרו מגנטית, מטרתה לדמות בצורה מדויקת את העולם הפיזיקלי, ולכן, יהיה זה שימושי לחשוב מה היינו עושים בעולם האמיתי, כלומר במעבדה. הדוגמא הפופולרית והיישומית ביותר הוא ה – Network Analyzer) NA) עבור תהליך כיול, לפני שעושים בו שימוש כאמצעי מדידה. מהי המשמעות של פעולה זו? בתהליך הכיול, ה – NA מבצע מספר מדידות של מבנים המתארים מצבי קצה מבחינת האימפדנס, היינו Open, Short, ו – Load. ישנן שגיאות מסויימות במדידות, הנובעים מאי השלמות של המערכת, כגון ניחות הכבלים, חוסר תאום מוחלט של המחברים, בידוד סופי בין ה – Ports ועוד. מטרת תהליך הכיול הינה להשתמש במידע שנמדד בכדי לבטל שגיאות אלו.
גם ה – Ports של הסימולטורים האלקטרו מגנטיים אינם מושלמים. ניתן לבטל אי – שלמות זאת באותו אופן שבו פעולת הביטול מבוצעת במעבדה, באמצעות מדידת מקרי קצה של האימפדנס. הערה סמנטית:
• במעבדה: תהליך הסרת השגיאות קרוי כיול.
• בסימולטורים האלקטרו מגנטיים (ברובם, לפחות): תהליך הסרת השגיאות קרוי De – Embedding. באופן ישיר נאמר כי התהליך כולל למעשה שילוב של כיול (ביטול הפרזיטיות) ושל De – Embedding (קיבוע מישור הייחוס).
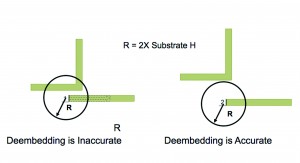
- איור 1: וודא כי קווים או מתכות סמוכים אינם נמצאים בקרבת Port המחובר למוליך אחר.
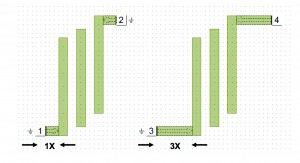
- איור 2: שני ה – Ports מוקמו קרוב מדי אל המסנן, כפי שניתן לראות בציור השמאלי.
פרטי התהליך תלויים בסוג ה – Port ובסימולטור עצמו. לעתים, מבוצעות סימולציות מאחורי הקלעים על ידי שימוש בקווי תמסורת. לעתים מתווסף קו תמסורת בעל אורך מסויים אל ה – Port. בכל המקרים, כלי הסימולציה עושה שימוש במבנים קנוניים של אימפדנסי קצה, בכדי להפטר מהשגיאות.
השגיאה הנפוצה ביותר מצד המשתמשים בתהליך ה – De – Embedding הינה שישנה נטייה לשכוח כמה מהנחת היסוד הבאה: מבנה הכיול נראה בדיוק כמו זה שבמבנה שבמעבדה. אנו מניחים שבקרבת ה – Port אין שום מתכת, למעט זו שה – Port מחובר אליה. אחרי הכל, מבנה הכיול כולל אך ורק Port וקו תמסורת. כלל האצבע המנחה במקרים מעין אלו הוא שלא צריך להיות אף אלמנט מתכתי בסביבת ה – Port, במרחק של פעמיים עובי השכבה הדיאלקטרית, במקרה שנעשה שימוש בכיול. איור 1 מדגים עניין זה. האיור השמאלי מתאר Layout שבו Port 1 קרוב מדי לקו תמסורת אחר. מערכת הכיול אינה יודעת דבר על קו זה ואי לכך, התיקון מתבצע עבור השגיאות הלא נכונות. מספר פתרונות אפשריים הינם: 1. להסיט את הקו הסמוך. 2. להימנע מתהליך הכיול. 3. לשנות את תהליך הכיול האוטומטי ולבצע כיול ידני.
כדוגמא מעשית, נבחן את המקרה הבא שהתרחש בפועל: מדובר בחברה המפתחת מסננים מפולגים (distributed) בעלי דיוק גבוה ובטכנולוגיית קווי תמסורת מסוג Microstrip. הם התקשו למצוא התאמה בין ביצועי הסימולציה לבין המדידות בפועל מתחת ל – 50[dB], ובשל כך היו להם ספקות בכל הנוגע לדיוק הסימולטור שעשו בו שימוש. הוצעו מספר הצעות לשיפור מתווה הסימולציה, כגון שימוש בקופסא מתכתית סביב המבנה של המסנן, כתיבה מדויקת יותר של הפסדי הקו והשכבה הדיאלקטרית ועוד.
הפתרון של הבעיה מתואר באיור 2: מיקום ה – Port היה קרוב מדי למסנן עצמו (בסדר גודל של עובי השכבה הדיאלקטרית). הזזת ה – Ports מהמסנן למרחק של שלוש פעמים עובי השכבה הדיאלקטרית, הוביל למצב שבו התוצאות תאמו עד כדי 80 [dB]. הבלבול המקורי נבע מכך שהמתכננים אכן ביצעו תהליך De – Embedding, אך גם חרגו מהנחות היסוד הנדרשות למהלך התקין של פעולה זו.
לסיכום, יש לבצע תהליך De – Embedding כאשר ניתן. תהליך זה מפחית את רמת השגיאות של הפרזיטיות ב – Ports, ואף מבטל אותן, וזהו כמובן רעיון טוב. אך עם זאת, וודא כי אינך מחמיר את הבעיה באמצעות הפרת כללי היסוד של תהליך ה – De – Embedding. כמו תמיד, זה אף פעם לא מזיק לבצע מספר ניסיונות על מבנים פשוטים לפני ההרצה הגדולה.
אודות המחבר:
ד”ר ג’ון דאן, מומחה מוכר בתחום המודלים וסימולציות אלקטרו מגנטיות בתחום מעגלי תדר גבוהה, הוא מהנדס יישומים בכיר בחברת AWR ומפתח חומר הדרכה ללקוחות AWR ברחבי העולם. לפני שהצטרף ל-AWR, הוא היה ראש קבוצת פיתוח מודלים ב- Tektronix וכן פרופסור להנדסת חשמל באוניברסיטת בולדר שבקולורדו, שם הוביל את קבוצת המחקר בנושא סימולציה ומודלים אלקטרו מגנטיים לתדר גבוהה.
ד”ר דאן הינו בוגר הפקולטה בפיסיקה שימושית של אוניברסיטת הרווארד ושם קיבל את המאסטר והדוקטורט שלו, כמו כן הוא חבר בכיר ב- IEEE.