



 מאת: ישי נצר
מאת: ישי נצר
בפברואר השנה שוגרה מעבורת החלל דיסקברי אל תחנת החלל הבינלאומית – החגה סביב כדור הארץ. בין היתר העבירה המעבורת אל תחנת החלל את הרובוט Robonaut-2 שתוכנן והורכב ע”י קבוצת הרובוטיקה שבבסיס נאסא ביוסטון.
הרובוט הוא דמוי אדם אך הדגם הנוכחי – הראשון שעזב את כדור הארץ ושהוא ללא רגליים, הורכב על בסיס קבוע בתוך תחנת החלל שם הוא “מתאמן” בביצוע מטלות שונות בתנאים של חוסר משקל, כגון: שליטה על לוח פיקוד, הפעלת כלי עבודה שונים וכו’. דגמים מתקדמים יותר של הרובוט יונחתו בעתיד על הירח ועל מאדים, ולמרות שלא הוחלט עדיין, נראה שהם ינועו בסופו של דבר על גלגלים.
אחת התכונות המייחדות את הרובוט היא חלקות ודיוק תנועותיו – וכאן נכנסת לתמונה הטכנולוגיה הישראלית.
בדומה למקביל האנושי שלו ,מסוגל הרובוט להניע את ראשו בשני צירים ולשלוט על פרקי ידיו ואצבעותיו. השליטה על תנועותיו מתבצעת ע”י מערכת ראיה מלאכותית, אך איכות ודיוק התנועה תלויה ברמת האנקודרים הסיבוביים המורכבים בכל אחד מן הפרקים. האנקודרים משמשים הן למדידת זויות התנועה והן למדידת המומנט בכל אחד מן הצירים. לצורך זה חיפשו מהנדסי נאסא אנקודרים העונים על הדרישות הבאות:
מבנה טבעתי – ללא מיסבים / פרופיל נמוך / דיוק גבוה / משקל נמוך / עמידות בתנאי הסביבה (רעידות, טמפרטורה, קרינה וכו’) / צריכת הספק נמוכה / אמינות גבוהה

- ציור 1 – ישי נצר הטכנולוג הראשי של נצר חישני תנועה מדויקים נפגש עם הרובונאוט
 לאחר חיפושים הגיעו מתכנני הרובוט אל אתר חברת Netzer Precision (נצר חישני תנועה מדויקים) שבאזור התעשיה משגב ,בגליל, ושם מצאו את מבוקשם. חברת נצר פיתחה טכנולוגיה ייחודית למדידת תנועה סיבובית ועל בסיסה היא מייצרת משפחה של אנקודרים סיבוביים ולינאריים ממנה נבחרו להתקנה ברובוט שני גדלים:
לאחר חיפושים הגיעו מתכנני הרובוט אל אתר חברת Netzer Precision (נצר חישני תנועה מדויקים) שבאזור התעשיה משגב ,בגליל, ושם מצאו את מבוקשם. חברת נצר פיתחה טכנולוגיה ייחודית למדידת תנועה סיבובית ועל בסיסה היא מייצרת משפחה של אנקודרים סיבוביים ולינאריים ממנה נבחרו להתקנה ברובוט שני גדלים:
DS-90 (קוטר 90מ”מ) ו- DS-130 (קוטר 130מ”מ) – בסה”כ 25 אנקודרים בכל רובוט.
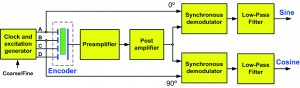
- ציור 3 – עיבוד האותות באנקודר
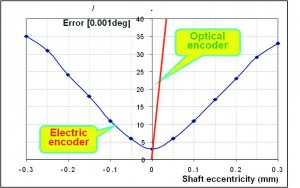
- ציור 4 – רגישות אנקודר חשמלי ואנקודר אופטי לאקסצנטריות הרוטור
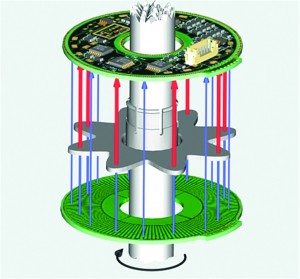
האנקודרים של נצר חישני תנועה מדויקים מבוססים על טכנולוגיה שהחברה מכנה בשם Electric Encoder . וככל אנקודר אחר הם מורכבים מסטטור ורוטור– ראה ציור עקרוני 2.
הסטטור מכיל מערך של לוחות (אלמנטים) קבל המעוררים ע”י שני מתחי חילופין שביניהם הזזת פאזה של 90 מעלות. הלוחות יוצרים שדה חשמלי משתנה המשרה זרם בלוח קליטה הנמצא ממולם. בין שני הלוחות נמצא הרוטור העשוי מחומר דיאלקטרי מיוחד ובהיקפו צורת גל סינוס. סיבוב הרוטור גורם לאיפנון עצמת השדה הנקלט ומעגל אלקטרוני מתרגם את הזרם למתח חילופין . מתח זה עובר דמודולציה סינכרונית ע”י הכפלה בשני מתחי ייחוס היחסיים למתחי העירור של המשדר. לאחר סינון מעביר נמוכים (LPF) מתקבלים שני מתחים התלויים בזוית הסיבוב –ראה ציור 3.
מספר מחזורי אות היציאה בכל סיבוב מכאני נקבע ע”י מספר מחזורי הסינוס שבהיקף הרוטור (- הערוץ העדין) ולכן זווית הסיבוב אינה יכולה להיקבע באופן חד משמעי על סמך שני אותות אלה. כדי לקבל את זווית הסיבוב באופן חד משמעי (זווית אבסולוטית) מכיל האנקודר ערוץ מדידה נוסף – ערוץ גס. ערוץ זה דומה בפעולתו לערוץ העדין אך מבוסס על איפנון סינוסואידלי של עובי הרוטור (אינו נראה בתמונה) ומערך נפרד של אלמנטי שידור, ולוח קליטה ומעגלי עיבוד ומשתמשים באותם שני לוחות סטטור. הערוץ הגס מיצר אותות סינוס וקוסינוס נפרדים.
תכנון האנקודר הוא כזה שלמספר המחזורים N של הערוץ הגס אין מחלק משותף עם מספר המחזורים M של הערוץ העדין, זהו תנאי הכרחי לכך שלכל זווית סיבוב יהיה שילוב ייחודי של ארבעת אותות היציאה, במלים אחרות נתן לקבל את זווית הסיבוב באופן חד משמעי עם הדלקת הספק וללא תנועה מוקדמת – כפי שנדרש באנקודרים אופטיים ומגנטיים אינקרמנטליים. האנקודרים האנלוגיים (שבהם משתמש הרובוט) מספקים את מתחי הסינוס והקוסינוס הגולמיים. הגרסאות הספרתיות של האנקודר החשמלי מכילות מעגלי המרה ועיבוד ומספקים את זווית הסיבוב בערוץ טורי.

- ציור 5 – אנקודר מטיפוס DS-90
יתרון חשוב של האנקודר החשמלי נובע מן העובדה שאותות היציאה נובעים ממלוא ההיקף של הרוטור (מבנה “הוליסטי”), עקב כך נהנה האנקודר ממנגנון מובנה של פיצוי כנגד אקסצנטריות, או הטיה, של הרוטור יחסית לסטטור, והקריאה הזוויתית כמעט ואינה מושפעת מאי דיוקי ההתקנה המכאנית. לשם השוואה, באנקודר אופטי נוצר האות רק מסגמנט קטן של הרוטור, ודיוקו מותנה בדיוק ההתקנה המכאנית. מסיבה זו מכיל כל אנקודר אופטי מדויק מסבי כדורים מדויקים. ציור 4 משווה את רגישות האנקודר החשמלי לאקסצנטריות הרוטור בהשוואה לזו של אנקודר אופטי בעל אותו קוטר, וניתן לראות שרגישותו נמוכה בהרבה.
התוצאה המעשית היא שהאנקודר החשמלי אינו זקוק למסבים פנימיים משלו, ומסתמך על מסבי המערכת המארחת. זוהי אחת הסיבות לפרופיל הנמוך שלו – ראה ציור 5.

