















 מאת: Yan Vainter, Freescale. תקציר המאמר: מערכות סיוע מתקדמות לנהג (ADAS) מסתמכות באופן משמעותי על חיישני מכ”ם למען השגת האופטימום במונחים של עלות ואמינות. במאמר זה נציג בקצרה את העיקרון העומד מאחורי פעולתו של מכ”מ גל רציף באפנון תדר (FMCW), נביא סקירה של עיבוד האותות הבסיסי ונדון בערכים המהותיים שאותם מספק הפתרון המוצע על ידי Freescale. נראה את רמת הבשלות והאינטגרציה שאליהן מגיעות כיום המערכות הפועלות ב- 77 ג’יגה-הרץ ונבחן את המערכות המתקדמות ביותר.
מאת: Yan Vainter, Freescale. תקציר המאמר: מערכות סיוע מתקדמות לנהג (ADAS) מסתמכות באופן משמעותי על חיישני מכ”ם למען השגת האופטימום במונחים של עלות ואמינות. במאמר זה נציג בקצרה את העיקרון העומד מאחורי פעולתו של מכ”מ גל רציף באפנון תדר (FMCW), נביא סקירה של עיבוד האותות הבסיסי ונדון בערכים המהותיים שאותם מספק הפתרון המוצע על ידי Freescale. נראה את רמת הבשלות והאינטגרציה שאליהן מגיעות כיום המערכות הפועלות ב- 77 ג’יגה-הרץ ונבחן את המערכות המתקדמות ביותר.
מערכת מכ”ם אינה יכולה להיות מושלמת ללא מיקרו בקר מקומי שמספק קישוריות אמינה אל שאר המערכות האלקטרוניות והחשמליות של המכונית, ובאותה העת יש לו יכולת מספקת על מנת לבצע את העיבוד הראשוני של האותות הגולמיים בפס הבסיס של המכ”ם הפועל בריבוי ערוצים. בהמשך נסקור את הארכיטקטורות של המיקרו-בקרים הקיימות כיום עבור עיבוד אותות המכ”ם ולצורך מיזוג הנתונים.
לבסוף, נדון בדרישות העומדות בפני מערכות המשנה של חיישני המכ”ם מבחינת הבטיחות הפונקציונלית. דוגמאות טיפוסיות לאופן שבו הבטיחות הפונקציונלית של חיישני המכ”ם נתמכת על ידי המיקרו-בקרים של חברת Freescale יסכמו את המאמר.
1. הקדמה
מערכות מכ”ם שימשו בעשורים האחרונים בעיקר בתחומי התעופה והחלל ורובם היו מבנים גדולים ומסורבלים שהוצבו על גגות בתי מגדלים ענקיים. הפוטנציאל הגלום בהם עבור יישומים שמיועדים לכלי רכב הוכר די מוקדם, ועם הקצאת התדרים לשימוש בכלי רכב ובתחום פס הגלים המילימטריים, נראתה התדירות של 77 ג’יגה-הרץ מתאימה עוד יותר, מאחר שבתדירות זו, למולקולות המים יש בליעה מרבית של הגלים. הצפיפות הגבוהה, אשר על פי הצפוי אמורה הייתה להידרש מהתקני מכ”ם לכלי רכב, והטווחים הקצרים למדי (בהשוואה ליישומי תעופה וחלל) הצדיקו את בחירת התדר הזו. על אף שרוב התקני המכ”ם לטווחים קצרים עודם פועלים גם היום ב- 24 ג’יגה-הרץ, אין כל ודאות שפס תדירויות זה יהיה זמין לשימוש גלובלי בטווח הארוך.
טכנולוגיית המכ”ם רכשה לה מקום של כבוד במרחב היישומים המיועדים לכלי רכב כטכנולוגיית חיישנים עמידה עבור מערכות עזר לנהג. על מנת לקבל הבנה בסיסית באשר לאתגרים המעורבים בשימוש בטכנולוגיה זו, נציג בהמשך סקירה מפושטת של עקרונות הפעולה.
כמו כן, מופיע בהמשך תיאור של מערכת הפועלת בתדירות רדיו של 77 ג’יגה-הרץ, שנדרשת לשידור ולקליטה של גלי מכ”ם. החיישן מבצע גם עיבוד אותות בפס הבסיס בהיקף משמעותי, וגם בנושא זה נדון במאמר זה, ולבסוף נביא דיון קצר בנושא הבטיחות הפונקציונלית, שיש לה חשיבות מסוימת במערכות עזר מתקדמות לנהג.
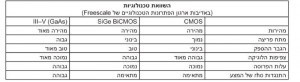
טבלה 1: השוואה בין היכולות של הטכנולוגיות השונות עבור מערכות הפועלות ב- 77 ג'יגה–הרץ
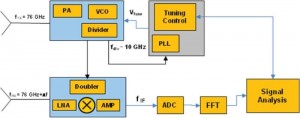
איור 1: תרשים בלוקים של חיישן מכ”ם.
2. טכנולוגיה
מערכות המכ”ם בגלים מילימטריים הראשונות שפעלו בטכנולוגיה של מעגלים משולבים הסתמכו על התקנים של מוליכים למחצה – דור III – V. כיום רוב מערכות המכ”ם לכלי רכב עודן משתמשות בטכנולוגיה גליום-ארסן, כדי ליצור את מעגלי החזית הקומפקטיים לת”ר (RF). בינתיים, טכנולוגיית SiGe – ששימשו לראשונה את תעשיית הטלפונים הסלולריים שהייתה החלוצה להשתמש בהם – התפתחה להיות טכנולוגיה עם יכולות דומות, אך בת”ר ובעלות נמוכה באופן משמעותי. הצרכנים יכולים היו לראות מערכות עזר מתקדמות עבור נהגים, במחיר שווה לכל נפש. האפשרות הטכנולוגית השלישית הייתה תהליך CMOS מהיר בעל ביצועים גבוהים, שפועל בטכנולוגיית צומת, שהיא הרבה יותר מעבר לרמת 90 ננו-מטר. טבלה 1 מציגה מבט מקיף של הערכים החשובים יותר הקיימים בכל אחת מהטכנולוגיות. לטכנולוגיית גליום-ארסן יש בידוד מצע טוב כדי להשיג צפיפות גבוהה של מעגלים בכל שבב, אך הצפיפות של הלוגיקה שאותה אפשר לקבל (עבור מעגלי בקרה) נמוכה למרבה הצער. באותו זמן, חומר פרוסת גליום-ארסן עדיין נשאר יקר בהשוואה ליעילות הגבוהה שמושגת בטכנולוגיית הסיליקון המשמשת בזרם המרכזי.
קשה יותר לטפל בחומרים מדור III – V מאשר בחומרי סיליקון, והגודל של הפרוסה או המצע שלהם ברוב המקרים קטן יותר ממחצית הגודל של פרוסת סיליקון. בנוסף אפשר לצפות שעלותה של פרוסת גליום – ארסן שנכנסת למתקן עיבוד תהיה גבוהה פי עשרה עד פי עשרים מהעלות המיוחסת לפרוסת סיליקון, על אף שההפרש בעלויות מצטמצם במידת מה לאחר תהליך הייצור, האריזה והבדיקות.
ומצד שני, מערכת CMOS, שהיא פשוטה בצומתי הטכנולוגיה המתקדמים, מציעה צפיפות לוגיקה טובה מאוד ובעלות טובה מאוד, אבל מתחי הפריצה הנמוכים של טכנולוגיות אלו, שמתוכננות למחשוב בביצועים גבוהים, לא מתקרבים אפילו לרמות ההספק הנדרשות לצורך פעולה אמינה בטווח הבינוני או הרחוק של מגזר המוצרים המיועדים עבור כלי רכב.
האפשרות הטכנולוגית שאין בה החסרונות העיקריים, משתמשת בתהליך BiCMOS השמרני שהורחב באמצעות מודול עיבוד גלים מילימטריים. מודול עיבוד זה מספק מבנים של טרנזיסטורי HBT בחומר SiGe:C אשר מציע את היתרון הבסיסי הכרוך בניידות גבוהה יותר של אלקטרונים, ניידות שמתורגמת למהירויות פעולה גבוהות יותר. תהליך BiCMOS מספק נצילות מספקת להוספה של מבני בקרה, שהם כדאיים מבחינת עלות ומיועדים עבור לולאות נעולות פאזה (PLL) ועבור ממשקי בקרה ספרתיים, כמו למשל ממשק SPI. הערכים של מתח הפריצה ושל הגבר ההספק תומכים במעגל המשדר ברמות הספק של 13dBm, ובאותה העת, מספקים בידוד שהוא מספיק לשילוב של ערוצי מקלט מרובים בשבב יחיד.
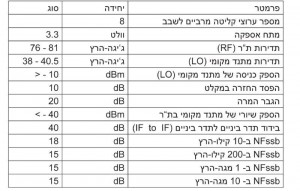
טבלה 1: פרמטרים חשובים של מקלט בריבוי ערוצים (NFssb הוא ספרת הרעש של פס צד יחיד - Single Side Band)
טבלה 2: פרמטרים חשובים של לולאת PLL בריבוי ערוצים במשדר.
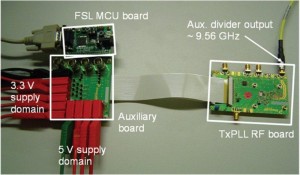
איור 2: ערכת ההערכה של לולאת PLL במשדר בתדירות של 77 גיגה–הרץ
3. הטופולגיה של המכ”ם והפרמטרים של המערכת
סוג האפנון המשמש ברוב מערכות המכ”ם עבור כלי רכב הוא שיטת גל רציף באפנון תדר
(FMWC). למעשה, זו מערכת פשוטה ביותר ואמינה מאוד, אשר משתמשת באות גל נושא רציף שהתדירות שלו משתנה על פי לוח זמנים המוגדר מראש, כמו למשל שיפוע בזמן. הטווח שבו מתרחש שינוי תדירות זה מגדיר את רוחב הפס של מערכת המכ”ם. באופן כללי, עבור מערכות מכ”ם הפועלות ב- 77 ג’יגה-הרץ, קיים חריץ תדירות של 1 ג’יגה-הרץ המוקצה סביב 76.5 ג’יגה-הרץ וחריץ תדירות של 4 ג’יגה-הרץ סביב 79 ג’יגה-הרץ. בדרך כלל טווח התדירות של 77 ג’יגה-הרץ תואם לחיישני מכ”ם לטווח רחוק, וטווח התדירויות של 79 ג’יגה-הרץ משויך למערכות מכ”ם לטווח קצר.
ברוב המקרים, המשדר כולל מתנד מקומי (LO), שאותו אפשר לכוון באופן רציף באמצעות לולאת PLL. קצב ההטיה (sweep rate) של התדירות הנגרמת כתוצאה מכך, הוא פרמטר חשוב של המערכת, כפי שנראה בהמשך.
איור 1, שלעיל, מציג את תרשים הבלוקים של חיישן המכ”ם בעל האינטגרציה הגבוהה. המתנד מבוקר המתח (VCO), שנמצא על שבב המשדר, יוצר את האות המשודר בתדירות של 77 ג’יגה-הרץ, אשר מוגבר במגבר ההספק (PA) ונשלח לאנטנת השידור. מתח הכיוון עבור מתנד VCO נוצר במעגל לולאת PLL, אשר גם היא משולבת בשבב המשדר. קצבי הטיה גבוהים של תדירות מהווים דרישה חשובה לצורך השגת דיוק גבוה של מהירות המטרה. על מנת להקטין את עלויות המערכת, קבוצת שבבי מערכת החזית בת”ר תומכת בחלוקה של המתנד המקומי למחצית תדירות השידור (בערך 38 גיגה-הרץ). בטבלה 1 מופיעים כמה פרמטרים חשובים של המקלט. קיימת חשיבות גבוהה לעצם זה, שאר מערכת החיישן מטפלת בניתוח של רכיבי התדירות בתדר ביניים מיקרו-בקר. אנטנות קליטה מרובות מאפשרות לחיישן לקבוע את הכיוון של המטרות. מעיון באיור אפשר לראות שיש צורך להעריך ברוב המקרים רק את הרכיב הממשי של אות תדר הביניים. עם זאת, יש צורך לבדוק את הרכיבים המרוכבים של פאזת האות באמצעות טרספורם פורייה. קיום של בידוד גבוה של תדר ביניים לתדר ביניים (IF- to – IF), על מנת שלא להגביל את הארכיטקטורות של מכ”ם בריבוי ערוצים למקרה של צימוד פרזיטי של אותות. ובנוסף, די ברמות הספק נמוכות ביותר (10dBm – <) של כניסת המתנד המקומי, על מנת להשיג את הפרמטרים המוצגים בטווח הטמפרטורות של השבב, שהן בין -40OC לבין +125OC.
טבלה 2 מציגה את הפרמטרים החשובים של לולאת PLL במשדר. שילוב של הספק מוצא גבוה עם טווח רחב של בקרה דינמית קיים בשימוש ב- 4 ערוצי מוצא לכל היותר (בכל נקודת זמן מסוימת יכול להיות ערוץ אחד בלבד שפעיל). מהירות שיפוע מרבית של 7.8 מגה-הרץ לננו-שניות מאפשר יצירה של זמני “צרצור” (chirp) קצרים ביותר, אשר נדרשים עבור מערכות מכ”ם בעלות רזולוציה גבוהה.
גילוי האפנון של האות הנקלט מבוצע במקלט מסוג homodyne באמצעות ערבול של האות הנקלט עם התדירות של המתנד המקומי. תדירות תדר הביניים שנוצרת כוללת רכיבי תדירות שתואמים לעצמים מחזירים במרחקים שונים. כל ההמרה כלפי מטה אל פס הבסיס הקרוב של האותות בת”ר מבוצעת בשבב מקלט יחיד אשר קולט את התדירות של המתנד המקומי מהמשדר.
על מנת לחקור את היכולות של לולאת PL במשדר בתדירויות נמוכות השתמשו בערכת ההערכה (איור 2) המורכבת ממעגל הליבה של ת”ר של לולאת PLL במשדר וממעגל עזר (ליצירה של מתחי אספקה ושל ממשק SPI), אשר מספק את מוצא המעגל המחלק בתדירות של 9.5 גיגה-הרץ בערך (אות המוצא של המשדר מחולק בשמונה). בקר מיקור של חברת Freescale ותוכנת Windows XP משמשים אף הם – עובדה שמאפשרת ביצוע קל של בקרה על שבב לולאת PLL שבמשדר, באמצעות ממשק משתמש גרפי.
גילוי האפנון של האות הנקלט מבוצע במקלט מסוג homodyne באמצעות ערבול של האות הנקלט עם התדירות של המתנד המקומי. תדירות תדר הביניים שנוצרת כוללת רכיבי תדירות שתואמים לעצמים מחזירים במרחקים שונים. כל ההמרה כלפי מטה אל פס הבסיס הקרוב של האותות בת”ר מבוצעת בשבב מקלט יחיד אשר קולט את התדירות של המתנד המקומי מהמשדר.
על מנת לחקור את היכולות של לולאת PL במשדר בתדירויות נמוכות השתמשו בערכת ההערכה (איור 2) המורכבת ממעגל הליבה של ת”ר של לולאת PLL תבמשדר וממעגל עזר (ליצירה של מתחי אספקה ושל ממשק SPI), אשר מספק את מוצא המעגל המחלק בתדירות של 9.5 גיגה-הרץ בערך (אות המוצא של המשדר מחולק בשמונה). מיקרו-בקר של חברת Freescale ותוכנת Windows XP משמשים אף הם – עובדה שמאפשרת ביצוע קל של בקרה על שבב לולאת PLL שבמשדר, באמצעות ממשק משתמש גרפי.
שאר מערכת החיישן מטפלת בניתוח של רכיבי התדירות בתדר ביניים במיקרו-בקר. אנטנות קליטה מרובות מאפשרות לחיישן לקבוע את הכיוון של המטרות. מעיון באיור אפשר לראות שיש צורך להעריך ברוב המקרים רק את הרכיב הממשי של אות תדר הביניים. עם זאת, יש צורך לבדוק את הרכיבים המרוכבים של פאזת האות באמצעות התמרת פורייה.
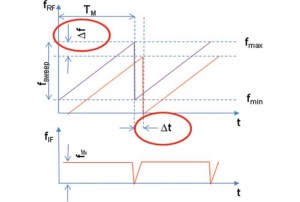
איור 3: שיטת אפנון FMCW: תדירות השידור בשחור תדירות הקליטה באדום
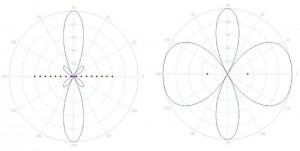
איור 4: קונפיגורציות של אלומות אנטנה באמצעות 2 ערוצי קליטה (ימין) ו-16 ערוצי קליטה (שמאל).
4. עיבוד אותות המכ”ם
גילוי המטרות במערכות מכ”ם מסוג FMCW נעשה על ידי ניתוח של תדירויות הפעימות מכל מטרה אשר קיימות באות תדר הביניים. איור 3 מציג את העיקרון הבסיסי: אות השידור מראה קונפיגורציית אות בהטיית תדירות שבין התדירויות (לדוגמה 77 ג’יגה-הרץ) לבין (לדוגמה 76 ג’יגה-הרץ) עם זמן מחזור . האות המוחזר ממטרה אחת מוצג בצבע אדום והוא מראה השהיית זמן של הנובע מהמרחק והזזת תדר של הנובעת ממהירות דופלר של המטרה.
האות בתדר הביניים מכיל מידע בנוגע למרחק ולמהירות של המטרה (או המטרות), אך לרוע המזל, שניהם נכללים בתדירות פעימה יחידה . הזזת הדופלר של אשר נובעת מהמהירות הרדיאלית של המטרה, מובילה לרכיב תדירות, . המרחק הרדיאלי d נגזר משינוי תדירות הביניים , כאשר קצב האפנון נתון על ידי . אם האות בתדר הביניים מורכב משני הרכיבים עובדה שמובילה לחוסר של חד משמעיות מבחינת משימת עיבוד האות.
יש דרכים רבות לפתרון חוסר חד משמעיות כזו. הדרך הפופולרית ביותר היא להשתמש בריבוי של לוחות זמנים לאפנון, כלומר, עלייה הדרגתית בתדירות (כפי שמוצג באיור 3), ולאחריה ירידה הדרגתית בתדירות. שיטה זו מאפשרת שימוש ברוחב פס מתון של תדר ביניים והיא משמשת במידה רבה בדור הנוכחי של מערכות מכ”ם לכלי רכב. עבור ורזולוצית טווח של מטר אחד וורזולוצית מהירות של 1 קמ”ש די בקצב הטיה מתון של 50 מגה-הרץ למילי-שנייה. טווחי גילוי של 200 מטר ומהירויות יחסיות של מינוס 180 קמ”ש עד פלוס 360 קמ”ש מגבילים את תדר הביניים לפחות מאשר 100 קילו-הרץ. עיבוד אותות בפס הבסיס יכול על כן להשתמש בממירים מאנלוגי לספרתי (ADC) הבנויים בתוך המיקרו-בקרים הקיימים לכלי רכב ולהגיע לרמות גבוהות של אינטגרציה.
שיטת טווח דופלר משכה לאחרונה תשומת לב מסוימת ביישומים לכלי רכב. טכניקה זו מספקת פתרון ישיר לבעיה של חוסר החד משמעיות בתדר הביניים, על ידי הפעלה של צרצורים מרובים בתוך מחזור שידור יחיד Tm ובכך היא מספקת רכיב בעל טווח גדול יותר בהרבה של תדירות הפעימה ומגבילה את רכיב הדופלר לפאזה של האות בתדר הביניים.
גילוי של הכיוון הזוויתי של המטרה דורש שימוש ביותר מאשר באנטנה אחת. כיוון ההגעה נקבע בפשטות באמצעות ניתוח גיאומטרי של הפרש הפאזה של הגלים הנקלטים מהמטרה. שיטה זו נקראת יצירת אלומה ספרתית (DBF) מאחר שאפשר לחשב את האלומות בכל כיוון באמצעות אורך החריר של האנטנה במערך. ביישומים לכלי רכב אורך החריר מוגבל בדרך כלל על ידי עיקבת האנטנה שמוגדרת על ידי יצרן הרכב.
המספר המינימלי של ערוצי קליטה עבור רזולוציה מיוחדת הוא 2. עם זאת, יידרשו יותר משתי אנטנות קליטה כדי להשיג תרשים סביר של אנטנה. איור 4 מציג את תרשימי האנטנה שווי הערך עבור קונפיגורציות של שתי אנטנות קליטה (ימין) ושל 16 אנטנות קליטה (שמאל). היתרון העיקרי של השימוש באנטנות רבות יותר הוא הדיכוי של אונות הצד.
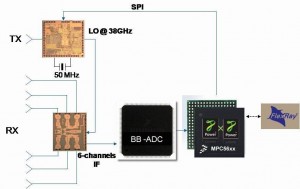
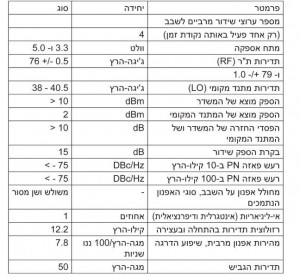
איור 5: מערכת מכ”ם לדוגמה בשישה ערוצים מבוססת עיבוד טווח-דופלר
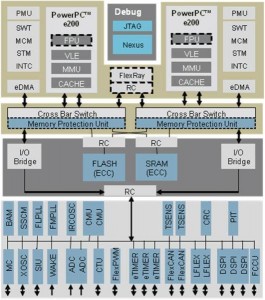
איור 6: יחידת הבטיחות הפונקציונלית של המיקרו-בקר MPC5643L
5. תכנון מערכת חיישני מכ”ם
איור 5 מציג מודול חיישני מכ”ם אופייני בכל 6 ערוצים מבוסס אלגוריתם טווח–דופלר. במערכת זו, קיימים אך מעט מאוד רכיבים שמאפשרים בכך קבלת ביצועים גבוהים, בעלות סבירה. כל פונקציות השידור בת”ר משולבות בשבב BiCMOS יחיד, כולל מתנד VCO, מחולל אות העלייה ההדרגתית (ramp) וממשק SPI, אל המיקרו-בקר המשמש לבקרה. אות שעון הבסיס של 50 מגה-הרץ הנוצר בגביש מספיק כדי ליצור אות שעון בסיס של 77 ג’יגה-הרץ לשידור. אות המוצא של המתנד המקומי מוזן ישירות אל תוך שבב המקלט לקבלת גילוי אפנון קוהרנטי. על מנת לשלוט בנושאי הפרעות EMC טוב יותר, נשלחת רק מחצית אחת של תדירות אות השעון על פני המעגל המודפס.
שבב המקלט מכיל את כל ששת ערוצי הקליטה בשבב BiCMOS יחיד והוא שולח שישה ערוצי תדירות ביניים אנלוגיים אל ממיר מאנלוגי לספרתי בשישה ערוצים, הפועל בתדר של 50 מגה-הרץ. ערוצי תדירות הביניים של החלק הממשי שעברו המרה לספרתי, עוברים עיבוד נוסף מיקרו-בקר בעל ביצועים גבוהים בדרגת איכות המיועדת לכלי רכב, ותקשורת FlexRay או CAN משמשת לשידור רשימות העצמים אל מעבד מיזוג הנתונים. אפשר לממש את פתרון החיישן המלא באמצעות ארבעה התקני סיליקון עיקריים.
6. דרישות הבטיחות הפונקציונלית
חיישני מכ”ם הופכים להיות חלק בלתי נפרד ממערכות בקרת שיוט מסתגלת (ACC), אשר בדרך כלל מספקות דרגה מסוימת של התערבות בתהליך הנהיגה. להיעדרן של תקלות שלא נתגלו יש חשיבות עליונה בפיתוח סוג זה של מערכות. תקן ISO26262 מגדיר את רמות שלמות הבטיחות עבור יישומים לכלי רכב (ASIL) ואת כמות השעתוק (replication) שיש להוסיף למערכות אלקטרוניות על מנת לעמוד בדרישות. כאשר חיישן המכ”ם הוא החיישן היחיד שקולט מידע לפנים, יש להשקיע מאמץ משמעותי כדי להשיג את דרוג רמת ASIL הדרושה במערכת החיישנים עצמה.
על מנת להקל על התכנון של מערכות עמידות ברמה גבוהה ביותר לתקלות שכאלו, המיקרו-בקר צריך לספק מידה משמעותית של יכולת שעתוק מובנית ולנטר התקנים. איור 5 מציג תרשים בלוקים של המיקרו-בקר החדש MPC5643L שתוכנן עבור מימוש של מערכות בעלות יכולת של רמת ASIL-D. על מנת לממש את היתירות בדרך שהיא כדאית ביותר מבחינה כלכלית, רק הכמות המינימלית של לוגיקה משוכפלת במרחב שנקרא “מרחב השעתוק” (מוצג החלק העליון של איור 6) המורכב מהחלקים הבאים:
ליבות e200 כפולות,
ערוצי eDMA כפולים
בקר פסיקות יתיר (INTC), קוצבי זמן בתוכנה (SWT) וכיו”ב
יחידות יתירות לניהול זיכרון (MMU)
יחידת (Cross-Bar (XBAR ויחידת הגנה על הזיכרון (MPU)
יחידות בדיקת יתירות (RC) בממשק אל המרחב שאין בו יתירות
הזיכרונות אינם מהווים חלק ממרחב השעתוק מפני שאפשר להגן עליהם ביעילות רבה למדי מפני תקלות באמצעות קודי שגיאות (ECC).
החלקים האחרים של ההתקן מוגנים מפני תקלות משותפות בעזרת ריבוי מעגלים יתירים לניטור מתח, חיישני טמפרטורה יתירים, מעגלים יתירים לניטור אותות שעון, וכיו”ב. עבור התקנים היקפיים מסוימים, כמו למשל, ממירים מאנלוגי לספרתי (ADC), מערכת BIST בחומרה עם תמיכה מכוונת מסייעת ליצור פונקציונליות ללא תקלות, בכל פעם שנדרש. כל התקלות המתגלות נאספות על ידי יחידת איסוף תקלות (FCC), שמציינת את השגיאות לעולם החיצון בלי קשר לפעולת התוכנה ומאפשרת למערכת כולה להיכנס למצב בטוח.
7. סיכום המאמר
במאמר זה הוצגה העובדה שחיישני מכ”ם בריבוי ערוצים הפועלים בטכנולוגיית BiCMOS בחומר SiGE כדאיים מבחינה כלכלית, אף אם משתמשים בהתפתחויות המתקדמות ביותר של אלגוריתמי עיבוד עבור יצירת אלומה ספרתית. התקני ת”ר משולבים מאפשרים לממש משדר בעל הספק גבוה עם אפנון מהיר, ליניאריות מצוינת ורמות גבוהות של אינטגרציה.
משפחה מסוימת של התקני מיקרו-בקרים עבור מגזר השוק Chassis מספקת משאבי עיבוד אותות שמספיקים עבור ארכיטקטורות מקלטים מתקדמות. באופן מיוחד, עיצוב אלומות ספרתי בעלות נמוכה נעשה אפשרי באמצעות ספריות עיבוד אותות בביצועים גבוהים, ואפשר בקלות לממש תפיסת בטיחות משולבת באמצעות ארכיטקטורת Lock-Step בריבוי ליבות.
