














 מאת: כריס לוברג, Tektronix
מאת: כריס לוברג, Tektronix
תקנים של נתונים טוריים ממשיכים לשגשג ולספק שיפורים משמעותיים ביותר לביצועים של מחשבים אישיים ומערכות שרתים. הבדיקות הנעשות בתקנים המהירים האלו, לאיתור סימנים של ריצוד (jitter), חיוניות ביותר למען השגת יציבות לטווח הארוך, ולקבלת ערכים טובים, באופן אובייקטיבי, של יחס סיביות שגויות (BER) בתכנון. ניתוח יעיל מתחיל בבחירת המכשירים הנכונים ובהבנה טובה של הרעש, של זמן העלייה ושל גורמים אחרים, כדוגמת ביצועי ההרמוניות מסדר שלישי, רביעי וחמישי, אשר קשורים למכשור.
ואולם, בתהליך זה גלום יותר מאשר ביצוע מדידות – יש לזווג את המכשירים המתאימים אל כלי הניתוח הנכונים. גורמים נוספים, כמו למשל הפרדה של הריצוד וביטול השיבוץ או השיבוץ של השפעות זרות (de-embedding/embedding) מהווים אף הם שיקולים חשובים בעת בדיקה של נתונים טוריים בקצבים שמעבר ל-8 ג’יגה-סיביות בשנייה. במאמר זה נתמקד בגישה חדשה להפרדה של הריצוד בנוכחות של ערבול אותות (crosstalk), שהיא בעיה גוברת והולכת ככל שמספר הנתיבים (lane) גדל מתוך מטרה להגדיל את התפוקה של מערכות המחשוב.
לכל המערכות החשמליות, המשתמשות במעברי מתח לייצוג מידע המתייחס לתזמון, יש ריצוד בתזמון. בעבר, במערכות חשמליות הפחיתו את ההשפעות המזיקות של הריצוד בתזמון (או של הריצוד בלבד), על ידי שימוש בקצבים נמוכים יחסית של העברת אותות. כאשר קצב הנתונים טיפס אל מעל 8 ג’יגה-סיביות בשנייה, החל הריצוד למלא חלק ניכר ממרווח הזמן של העברת האותות, והבנת הסוגים של הריצוד ומקורותיהם הפכה להיות חיונית לפריסה מוצלחת של טכנולוגיות טוריות מהירות.
במובנו הפשוט ביותר, הריצוד הוא סטייה של הקצה (של האות) מהמקום שבו היא אמורה להיות, כפי שמוצג באיור 1. על פי ההגדרה של איגוד התקשורת הבינלאומי – ITU – ריצוד הוא “שינויים קצרי טווח בפרקי הזמן המשמעותיים של אות ספרתי מהמיקומים האידיאליים שלהם בזמן”.
יש כמה דרכים שבאמצעותן אפשר למדוד ריצוד בצורת גל יחידה לרבות ריצוד של תקופת זמן, ריצוד ממחזור למחזור ושגיאת מרווח הזמן (TIE), ולעתים קרובות, התכנון הוא המכתיב איזו מבין המדידות היא המתאימה.
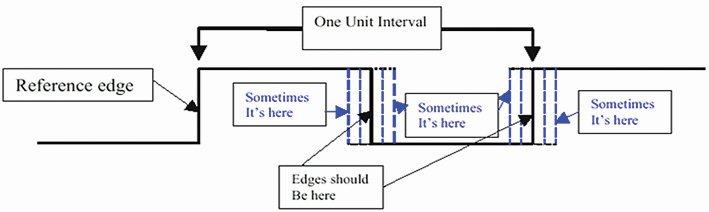
איור 1 ריצוד הוא הסטייה של קצה האות מהמיקום שבו היא אמורה הייתה להיות
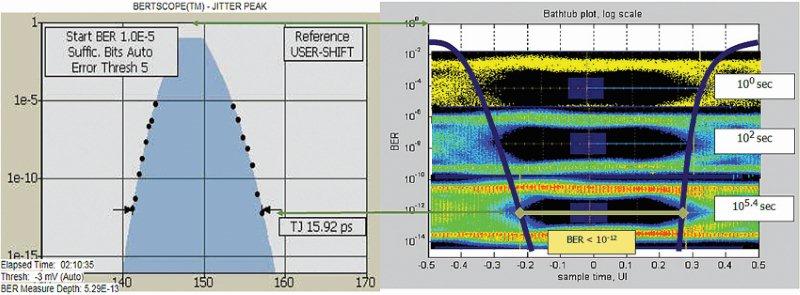
איור 2: השוואה בין מראה ביצועי BER של שיא הריצוד ממכשיר המדידה BERT – בצד שמאל, לבין תרשים “אמבטיה” של הריצוד של משקף התנודות – בצד ימין
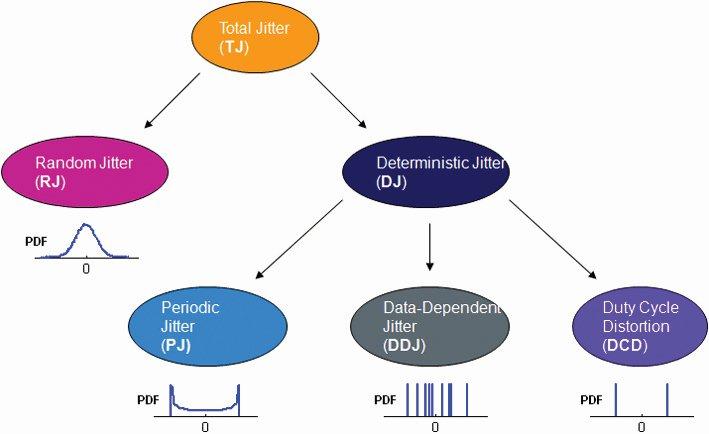
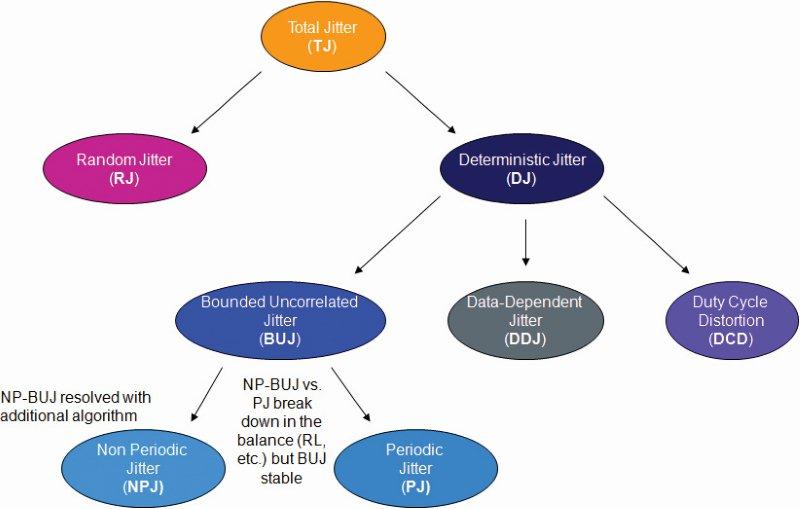
איור 3: מודל הריצוד הנהוג בתעשייה, 2001 - 2010
במקרה של מתנד שפועל באופן עצמאי, האות הוא אות שעון אשר יכול לדלג (hopping) או להיסחף (swept). במקרה כזה, ריצוד של תקופת זמן הוא המדידה המתאימה. כאשר המדובר במשדר עבור רצף נתונים טוריים, האות הוא רצף נתונים והפרעת ISI (הפרעה בין סמלים) היא הבעיה העיקרית. לכן, במקרה זה, ריצוד TIE הופך להיות המדידה המתאימה.
לרשות המהנדס המחפש את הבעיות הקשורות בריצוד עומדים כמה מכשירים, כאשר לכל אחד מהם יש נקודות חלשות ונקודות חזקות.
משקף תנודות (oscilloscope) עם זיכרון ספרתי (DSO) לזמן אמת – משחזר את צורת הגל כולה ויכול למדוד כל דבר. אפשר להשתמש בו למדידת TIE, למדידת ריצוד ממחזור למחזור ולמדידת ריצוד של תקופת זמן. עם זאת, יש לו מגבלות בתחומים של תדירות (או קצב סיביות) ורזולוציה של תחומי הספקטרום, בתחום של ריצוד זעיר ואפנון בריבוי רמות.
מודד יחס סיביות שגויות (מודד BER) – מתאים היטב למדידת ריצוד TIE, במיוחד למדידת הריצוד כולו (TJ), שהוא סוג של TIE. היתרון של מודד BER טמון ביכולתו למנות כל סיבית וסיבית, אבל ביצוע המדידות עלול לגזול זמן רב.
נתח ספקטרום לזמן אמת (RTSA) –
יכול לשמש למדידות ריצוד ממחזור למחזור וריצוד תקופת זמן עם אפנונים מורכבים עבור התקנים ניידים, כשהוא מאפשר בחינה של אותות שעון ושל לולאות PLL, וכן הבנה של הביצועים הדינמיים שלהם. במסגרת המגבלות שלו אפשר למנות טווח (מתחת ל-100 מגה-הרץ) ואותות רוחב פס עם ספקטרום רחב של אפנון.
משקפי תנודות שווי ערך לדוגמים בזמן – מציעים את רוחב הפס הטוב ביותר ויכולים לשמש לכל מדידות הריצוד עבור נתונים טוריים. כיום, משקפים אלו הם המכשירים היחידים שבהם משולבים יכולות של ניתוח רעש ובדיקת “עין BER”. במסגרת המגבלות שלהם אפשר למנות את חוסר יכולת לכידת אותות בזמן אמת, וכן את העובדה שהם יכולים לשמש רק למדידת תבניות חוזרות וחלק מתחומי הספקטרום של הריצוד מקופלים (aliasing).
אחת השאלות שמתעוררת לעתים קרובות, היא מדוע עלינו להיות מוטרדים בנוגע לריצוד, אם בסיכומו של דבר, כל מה שמדאיג אותנו הוא יחס הסיביות השגויות (BER). הסיבה היא שריצוד גדול מדי סוגר את ה”עין” (ברוחב), ומצב כזה עלול להוביל לשגיאות. ניתוחים של ריצוד ושל רעש, הם כלים שמאפשרים לחזות ולנתח במהירות בעיות ביחס BER. באופן כללי, הרי מדובר בשגיאות, אם כי לצורך ביטול שגיאות אלו בתכנון, יש צורך בתובנה מעמיקה של הסיבה – או של הסיבות – שגורמות לריצוד מופרז.
נקודת ההתחלה קשורה בהבנה של הדרך שבה המערכת פועלת מנקודת המבט של יחס BER הכולל. משקף התנודות מאפשר זאת באמצעות תרשימי “עין” וניתוח סטטיסטי ליצירה של תרשים “אמבטיה” (bathtub) (אשר נקרא בשם זה בגלל צורת התרשים שנוצר, עם השתנות הגבולות). בשימוש עם מודד BERT התוצאה המתקבלת היא עקומה של שיא הריצוד, שמקורה במנייה המדויקת של כל סיבית. כפי שאפשר לראות באיור 2, תרשים שיא הריצוד שמתקבל ממודד BERT (משמאל) שווה ערך באופן מדויק, כמעט, לתרשים “אמבטיה” של הריצוד שנוצר במשקף התנודות.
בהתבסס על הדמיון הרב שקיים בין התוצאות, משקף התנודות הוא כלי משלים, שימושי ביותר, למכשיר המדידה BERT, מאחר שהמדידה של הריצוד הכולל עד ליחס של BER=10-12 עלול לגזול שעות, אם משתמשים לצורך כך במודד BERT, והתוצאה אינה מאפשרת לגלות מהם סוגי הבעיות אשר גורמות לריצוד. משקף התנודות יכול למדוד כמות קטנה של נתונים בצורה חכמה, ולאחר מכן, לפרק את הריצוד לרכיביו, בדרך כלל, באמצעות המודל המקובל של הריצוד המוצג באיור 3.
על ידי הנחת הנחות, משקף התנודות יכול לבצע בשבריר זמן חישובי ריצוד כולל ביחס אשר ישקפו את התוצאות שנמדדו באמצעות מודד BERT – כל זאת אם ההנחות האמורות הן נכונות. כל המודלים של מערכות מורכבות מניחים הנחות ומבצעים הפשטות, כך שההתאמה בין המודל לבין ההתנהגות של מערכת אמיתית, לא תוכל לעולם להיות מדויקת. כפי שנדון בהמשך המאמר, בעיה שמאיימת כיום באופן מיוחד, היא ערבול אותות (crosstalk).
הבעיה הכרוכה בערבול אותות (crosstalk)
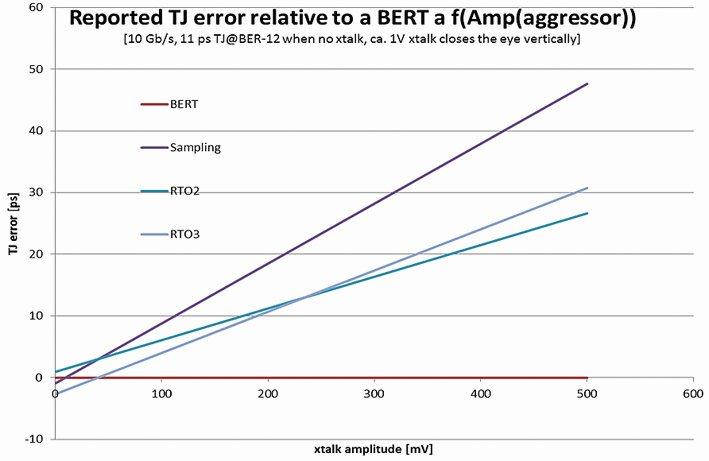
איור 4. שגיאת הריצוד הכולל במשקפי תנודות בהשוואה למודד BERT = משקף תנודות לזמן אמת, Sampling = משקף תנודות שווה ערך לדוגם בזמן).
איור 5. ניתוח ריצוד עם רגישות לריצוד BUJ והמפה הנוצרת של פירוק הריצוד
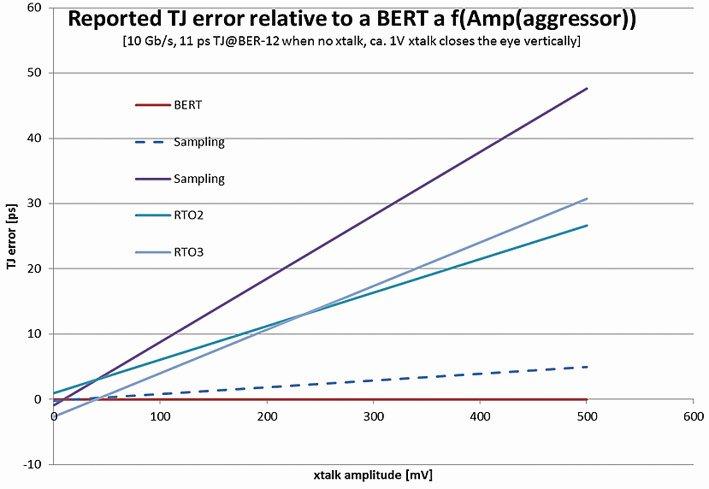
איור 6. האלגוריתם לניתוח ריצוד עם רגישות לריצוד BUJ (מופיע בקו מקווקו) מראה דיוק משופר בהרבה במדידה של יחידה נבדקת עם ערב דיבור רחב
רוב המערכות הטוריות משתמשות בריבוי נתיבים, על מנת לממש את מטרות הביצועים. כאשר התדירויות וקצבי הנתונים עולים אל מעל 10 ג’יגה-סיביות בשנייה, כמות קטנה של ערבול אותות עלולה ליצור בעיות של תזמון.
ערבול אותות מתרחש כאשר אות מסוים מושפע מאות אחר, שנמצא סמוך אליו. בקצבי נתונים גבוהים, האות מתפשט בצורה שדומה לגל מובל (guided wave – מועבר בגלבו) יותר מאשר בצורה שדומה למתח ישר פשוט. הגל מובל על ידי מסלול הולכה, אך הוא קורן דרך החומר הדיאלקטרי, שהוא בדרך כלל FR4. כאשר קיים יותר מאות אחד, כל אחד מהמסלולים הופך למסלול מוליך על המעגל, כולל ממצאי שוא (artifacts) של אותות בכל המסלולים האחרים. במינוח המקובל נוהגים לומר שאות אלים יותר גורם לערבול אותות באות הקורבן. מצב של ערבול אותות מתרחש כאשר האות האלים יותר נקלט על ידי המוליך שבו עובר אות הקורבן. אי רציפויות – שמהם לא ניתן להימנע – במערך המוליכים של המעגל, כמו למשל מחברים וחורי מעבר, במקום שבו הצימוד הקיבולי גדול יותר, נחשבים לנקודות חולשה הפועלות כמו אנטנות בפעולה המחוללת ערבול אותות.
משקף תנודות לדגימה בזמן אמת ומשקף תנודות שווה ערך לדוגם בזמן, משתמשים בטכניקות ניתוח ריצוד מבוססות ספקטרום, כדי להפריד את רכיבי הריצוד השונים. בציוד המשמש לדגימה בזמן אמת, שבו רכיבי התדירות אינם מקופלים, לספקטרום הריצוד ורעש המתח יש שיאים תת הרמוניים, אשר במקום להופיע כקווים חדים הם נראים מרוחים בצורות של תהודה רחבה. בציוד של דגימת חסר, כמו למשל משקפי תנודות שווי ערך לדגימה בזמן, אשר בהם הספקטרום מוזז, ערב הדיבור יופיע כרעש רציף.
בשני המקרים טכניקות ניתוח אלו של ריצוד, מבוססות ספקטרום, אשר מודדות ריצוד אקראי (RJ) על ידי אינטגרציה של רצף ספקטרום הריצוד, מפריזות בחשיבות הריצוד האקראי ביחס להשפעות התזמון של ערבול אותות. כך מתקבל גידול בריצוד אקראי והגזמה בהערכת הריצוד הכולל. איור 4 מציג מדידות של ריצוד במשקף תנודות, בדוגמה זו, מדידות של יחידה נבדקת עם כמות גדולה של ערבול אותות.
ערבול אותות נראה למשקף תנודות כריצוד חסום לא מתואם (BUJ) מפני שהוא מציית לפיזור חסום. האופי החסום של הפיזור מטושטש כתוצאה מהמורכבות של תבנית הנתונים. הפיזור הנראה אקראי של 1s ושל 0s גורם לשידור כמויות שונות של רעש מתח בכל אחד ממעברי האות האלים.
הפגיעות של ריצוד BUJ המושרה על ידי ערבול אותות משתנה בין מערכות המדידה. מדידות במשקף תנודות או אומדנים משוערים (חישובי אקסטרפולציה) של ריצוד, כורכים באופן מוגזם את ריצוד BUJ או את ריצוד NP-BUJ עם ריצוד אקראי, ולאחר מכן מוסיפים גם את הריצוד הכולל. התוצאות של הריצוד (RJ ו-TJ) תלויות במידה רבה במורכבות של תבנית האות האלים, כאשר PRBS31 נחשב לגרוע מכל. מאידך, PRB7 אינו גורם בדרך כלל לשגיאה גדולה. במקרה של משקפי תנודות לזמן אמת, תוצאות הריצוד האקראי והריצוד הכולל תלויות גם במשך התיעוד, ומשכי תיעוד ארוכים יותר מספקים נקודות דגימה נוספות שמתארות הפרדה טובה יותר. המנגנון המדויק של הבעיה תלוי גם במימוש.
פתרונות של מדידת ריצוד BUJ
כיום קיימות כמה גישות לניתוח ריצוד באותות שבהם קיים חשד לערבול אותות, אך אף לא אחת מהן מספקת בלחיצת כפתור יחידה תוצאות, שדומות לתוצאות שכמותן יכולים לספק משקפי תנודות עבור ריצוד DDJ ועבור ריצוד PJ. אחד הרמזים לכך הוא כאשר נתח הריצוד מדווח על מדידת ריצוד אקראי גדול באופן מופרז. נדיר שההשפעות התרמיות, שהן הסיבה המכרעת לריצוד אקראי, מצליחות לגרום לריצוד של יותר מאשר שלוש פיקו שנייה RMS. אם הריצוד האקראי המדווח גדול יותר מאשר שלוש פיקו-שנייה, סביר שהבעיות נגרמות בשל ערבול אותות.
תחבולות נוספות לזיהוי ערבול אותות דורשות קיום בקרה משמעותית יותר על ערוץ האות האלים. למשל, אם אפשר לכבות את האות החשוד כאלים, אפשר יהיה להשוות את מדידת הריצוד האקראי עם האות האלים או בלעדיו. אם הריצוד האקראי עם האות האלים גדול מהריצוד האקראי ללא האות האלים, נראה שהבעיה היא ערבול אותות. עקיפת הבעיה יכולה להתבצע באמצעות שימוש במדידה של הריצוד האקראי, כאשר האות האלים כבוי, ומדידה של ריצוד DJ לפי מודל Dual Dirac, עם אות אלים פועל, על מנת להעריך את הריצוד הכולל של המערכת בנקודת יחס BER שבה מעונינים. הבעיה הקיימת בגישה זו היא העובדה שנדרשת כאן בקרה על האות האלים, אשר אינה תמיד אפשרית. בעיה נוספת היא מוגבלות השיטה במערכות לא ליניאריות (שאלו הם למעשה רוב המשדרים), והיותה נוקטת סלחנות כלפי שגיאות, מאחר שחלק מערב הדיבור בלתי מוגבל.
גישה מתקדמת מעט יותר היא לממש אלגוריתמי ניתוח ריצוד עם רגישות לריצוד BUJ. אלגוריתמים אלו יהיו כרוכים בצעד נוסף בניתוח הריצוד לאחר הפרדת ריצוד DDJ וריצוד PJ, כדי להפריד את ריצוד NP-BUJ מהריצוד האקראי (RJ), כפי שמוצג באיור 5. יתרון חשוב הנובע מכך, הוא שניתוח כזה יפעל בכל תרחיש מאחר שלא נדרשת כלל בקרה על האות האלים, ומשדרים לא ליניאריים לא יציבו בעיות כלשהן.
על מנת לבדוק את יכולתו של אלגוריתם לניתוח ריצוד להפריד במדויק את ריצוד BUJ ממקורות ריצוד אקראיים אחרים, אנו חוזרים על הבדיקה הנראית באיור 4, אם כי עם תוספת של תוצאות ממשקף תנודות שווה ערך לדוגם בזמן, באמצעות אלגוריתם ניתוח ריצוד עם רגישות לריצוד BUJ. התוצאה המצוינת על ידי קו מקווקו באיור 6 עדיין מציגה מעט מהגישה השלילית בהשוואה למודד BERT. התוצאות שהתקבלו עם משקפי תנודות לזמן אמת היו מעט יותר מחמירות. דיוק שגיאות המדווחות האמורות של ריצוד TJ השתפר באופן ניכר, והפך לאמינות את התוצאות המתקבלות ממדידות ריצוד TJ בעזרת משקף תנודות, אפילו בתכנונים שבהם יש חשד שערבול אותות יכול להיות מקור לשגיאות הקשורות לריצוד ולרעש.
סיכום
ככל שקצבי הנתונים ממשיכים לגדול, הריצוד הפך להיות חלק ניכר ממרווחי הזמן של האותות, וחשיבותו גדלה והולכת עבור המתכננים למען שיבינו את הסוגים והמקורות של הריצוד בתכנונים שלהם. מאחר שרוב התכנונים הטוריים המהירים משתמשים בריבוי של נתיבים, ערב הדיבור הפך להיות תוצאה כמעט בלתי נמנעת שאותה יש לקחת בחשבון בהקצאת תקציב עבור ריצוד.
עם זאת, ידוע היום לשמצה הקושי למדוד את ההשפעות של הריצוד המושרה מערבול אותות או של ריצוד חסום לא מתואם (uncorrelated), באמצעות הטכניקות להפרדת סוגי הריצוד. מאחר שבאלגוריתמי הריצוד, האחריות להפרעות לא הוטלה על ריצוד BUJ, הם התגבשו עם ריצוד אקראי, עובדה שהובילה לתוצאות של ריצוד כולל שליליות יותר מאשר התוצאה המתקבלת עם מודד BER.
עם ההכרה בבעיה גוברת זו, ובמיוחד בקצבי נתונים של יותר מ-10 ג’יגה-סיביות בשנייה, המודל של הריצוד מתרחב וכולל את ריצוד BUJ בעזרת ההוספה של אלגוריתמים רגישים לריצוד BUJ. בבדיקות הכרוכות בכמות רבה של ערבול אותות, המודלים החדשים הוכיחו את יעילותם בכך שסיפקו תוצאות של ריצוד כולל באמצעות משקף תנודות לזמן אמת ובאמצעות משקף תנודות שווה ערך לדוגמים, שהיו עקביות עם התוצאות שהתקבלו ממודד BERT. הם מאפשרים גם ניתוח מעמיק יותר של בעיות הריצוד בשלב התכנון לרבות ריצוד המושרה מערבול אותות.
כריס לוברג [Chris Loberg] הוא מנהל שיווק טכני בכיר בחברת Tektronix והוא אחראי לתחום משקפי התנודות באזור של יבשות אמריקה.כריס מילא תפקידים שונים בחברת Tektronix במהלך 13 השנים שבהם הוא עובד בחברה, לרבות מנהל שיווק של היחידה העסקית האופטית בחברת Tektronix. הרקע הנרחב שלו בשיווק טכנולוגי כולל כמה תפקידים שבהם שימש בקבוצת Grass Vally ובחברת IBM. הוא נושא בתואר MBA בשיווק, שאותו קיבל באוניברסיטת המדינה בסאן–חוזה.
הכתבה נמסרה באדיבות חברת איסטרוניקס.
