מגמות במכשירי חשמל ביתיים ובממשקי אדם מכונה תעשייתיים
מגמות במכשירי חשמל ביתיים ובממשקי אדם מכונה תעשייתיים
הקדמה: ממשקי חישת מגע הופכים במהירות לנורמה במוצרים רבים, מכיוון שמדובר בשילוב מעשי מאוד. למרות שממשקי חישת המגע מצאו בתחילה את אכסנייתם במוצרים צרכניים, הטכנולוגיה הזו כיום שכיחה יותר גם במערכות תעשייתיות ובמכשירים חשמליים ביתיים, מכיוון שהיא מאפשרת מימוש פשוט ויעיל.

תרשים 1 מקשים יחידים
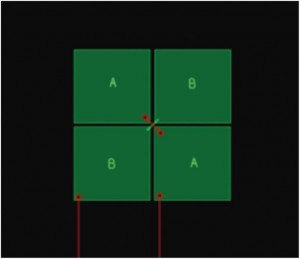
תרשים 2 מערך אלקטרודות למירוב מספר המקשים האפשריים
יישומים טיפוסיים
יש שני ענפים של יישומים המבוססים על חישת מגע קיבולית: מסכי מגע ומקלדות נומריות מבוססות מגע. מסכי מגע מורכבים ממשטחים שקופים, שממוקמים מעל המסך, וכוללים חיישנים שמשתמשים יכולים לגעת בהם. תוכנה מפענחת את הנגיעות הללו כמיקומים וכמחוות. הסוג היותר שכיח של מסכי מגע מבוסס על ניגודיות, אבל מסכי מגע קיבוליים הופכים לסטנדרד בזכות ההשפעה של מוצרים צרכניים כגון טלפונים חכמים וטאבלטים, וכן בגין היתרונות שהם מציעים לעומת מסכי המגע הניגודיים המסורתיים, ובעיקר פחות בלאי והיכולת לתמוך ביותר מחוות מתקדמות. מסכי מגע קיבוליים בדרך כלל מתוכננים לעבוד במצב קיבוליות מוקרנת (שידוע גם בשם קיבוליות הדדית). במצב זה, הקיבוליות נמדדת בין שני אלקטרודות. הנוכחות של אצבע מסיטה את המטען מהמעגל וחיישן המגע מזהה את השינוי הזה כמגע.

תרשים 3 מחוון נפרד למדידת מיקום/העברה

תרשים 4 תבנית מחוון אנלוגי לאיתור העברה
בדרך כלל בקרי מסך מגע הם ASIC (מעגל משולב תלוי יישום) עצמאיים בגין העובדה שמסכי המגע כוללים מערכי אלקטרודות רבים, שבתורם מתורגמים לכדי פינים רבים. ליישומי מיקרו בקרים יש בדרך כלל כמות מוגבלת של פינים נוספים שפשוט זמינים, ולכן לא מעשי לשלב את כמות הסיליקון והפינים הנדרשים לצורך בקר מסך מגע קיבולי עם רזולוציה מלאה ויכולות ריבוי-מגע. ביישומים כאלה, היחידה מרובת השבבים תתפקד כבקר מארח לחיישן מסך המגע. בנוסף, יש לשים לב שמסכי מגע ברזולוציה מלאה בדרך כלל מגיעים כיום עם יחידה גרפית מתקדמת, תופעה ששכיחה יותר במערכות מבוססות מיקרו-מעבד. ולכן, לפחות כרגע, יחידות מרובות שבבים בדרך כלל לא עובדות עם מסכי מגע שפועלים במצב קיבוליות מוקרנת. עם זאת, בפסקאות הבאות אנו נראה שהפער מתחיל להיסגר.
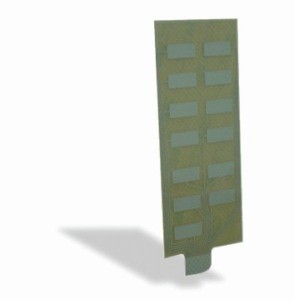
תרשים 5 פתרון פילם קיבולי
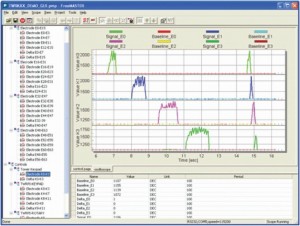
תרשים 6 FreeMASTER: כלי הוויזואליזציה של פריסקייל
מצד שני, מקלדות נומריות מבוססות קיבוליות נוחות יותר לשימוש במערכות שמבוססות על מיקרו בקר. למרות שקיימים מספר חיישני קיבוליות מוקרנת, רוב מערכות המגע הקיבוליות המשובצות מיקרו בקר הינן מערכות קיבוליות עצמית. קיבוליות עצמית מתייחסת למערכות מגע קיבוליות בהן קיבוליות האלקטרודות נמדדת ביחס לקרקע. מערכות קיבוליות עצמית בדרך כלל נהנות מרגישות גבוהה יותר לעומת מערכות קיבוליות מוקרנת, עד כדי היכולת להשתמש במערכות קיבוליות עצמית גם לצורך מדידת קרבה. חיישני קיבוליות עצמית פועלים באמצעות פין יחיד של מיקרו בקר, עם מעגלי מדידה יחסית פשוטים (בניגוד למערכי המטריצה הנדרשים בעת שימוש בקיבוליות מוקרנת), וזה מסביר מדוע הן מתאימות יותר לשיבוץ במיקרו בקר. מקלדות נומריות מבוססות קיבוליות עצמית ניתנות לשימוש במספר יישומים בכדי להחליף את מה שעושות מערכות קלט מכניות. התחליף הטיפוסי ביותר הוא כפתורים, אותם ניתן להמיר מכפתורי לחיצה עם תפקוד יחיד, כל הדרך עד למקלדות QWERT מלאות. ניתן לתכנן מערכי ריבוב כדי להתמודד עם האתגר של התבססות על אלקטרודות בכמות קטנה יותר ממספר המקשים בהם יש כוונה להשתמש. התרשימים להלן מראים תכנון של מקלדות נומרית המשתמשות באלקטרודה יחידה ותכנון מקלדת נומרית המשתמש באלקטרודות מרובבות כדי להגדיל את מספר המקשים האפשרי.
קיימים שימושים מעשיים נוספים לחיישני קיבוליות עצמית. התקני קלט מכניים אחרים שניתן להחליף כוללים נגדים משתנים (כולל ליניאריים ומעגליים) ומקודדים. ניתן ליישם מערכי אלקטרודות בתלות בסוג הקלט המסוים הנדרש. מערכים אלה בדרך כלל מכונים מחוונים קוויים וסיבוביים. בעזרת שני המחוונים הללו ניתן למדוד מיקום או העברה בהתאם לתכנון המסוים כפי שניתן לראות בתרשימים הבאים.
תכונה חשובה אחרת של חיישני קיבוליות עצמית היא שעם שימוש באלקטרודה הנכונה ובהגדרת רגישות, ניתן ליישם חיישן קרבה. ניתן להשתמש בחיישני קרבה כדי לגרום לפעולות מסוימות כשיד ניגשת לממשק, כמו הפעלת תאורה או הפעלת אזעקה, מצד שני.
היכולת לשלב מספר תבניות של חיישני מגע עם תוספת האפשרות לחישת קרבה, מספקת למתכננים את האפשרות ליישם ממשקי משתמש מעניינים, מעשיים וקלים לשימוש. כמו כן, בניגוד למסכי מגע שקופים שמבוססים על קיבוליות מוקרנת, שדורשים תהליך ייצור יקר מאוד (במיוחד בשלב יצירת האבטיפוס), חיישני קיבוליות עצמית ניתנים ליישום בתוך כל חומר מוליך שניתן לעצב כמשטחים שטוחים. חומרים מסוימים טובים יותר מאחרים, אבל באופן כללי, ככל שהם יותר מוליכים כך הם טובים יותר, כך שהדפסת מקלדת נומרית על נחושת על לוח מעגל מודפס הינה מומלצת וגם מציעה עלות נמוכה מאוד. לאחר שמתכננים את מערך המקלדת הנומרית ומסדרים אותה על לוח המעגל המודפס, מתכננים גרפיים יכולים לשרטט את כל מה שנדרש על המשטח הלא מוליך שיכסה את האלקטרודות. קיימות אפשרויות נוספות, ולדוגמה, פילם קיבולי בו המערך מודפס על דיו מתכתית מעל לפלסטיק גמיש. ספקי פילם קיבולי יכולים לשלב את כל השכבות ההכרחיות: שכבה לא מוליכה, תבנית המקלדת הנומרית, מחברים, לדים (לצורך משוב וויזואלי), גרפיקה ואפילו שכבת דבק לשילוב קל של הפילם בהרכבה הסופית.
מגמות בתעשייה
ממשקי אדם מכונה תעשייתיים בדרך כלל מוגדרים בתוך מסך LCD או LED עם חיישן מסך מגע. מערכות תעשייתיות עדיין משתמשות במסכי מגע המבוססים על ניגודיות בגלל עלותם ואמינותם – הם אינם מכנים אלא אלקטרוניים. מסכי מגע קיבוליים רגישים להולכת רעשים, ורעשים הם כמובן דבר מאוד שכיח בסביבות תעשייתיות, בהינתן המספר הגדול של ההתקנים ההשראתיים אותם ניתן לחבר לקווי זרם החילופין. בנוסף, רמות מוליכות הרעש בסביבות תעשייתיות גבוהות יותר מאשר בסביבות אחרות. מסכי מגע מבוססי ניגודיות נוטים לסבול פחות מסוגי ההפרעות הללו. מצד שני, ממשקי אדם מכונה תעשייתיים בדרך כלל אינם זקוקים למחוות מורכבות ולזיהוי ריבוי-נגיעות להם רגילים משתמשי טלפונים חכמים וטאבלטים. מסיבה זו קיימת נישה בה ניתן להשתמש במסכי מגע קיבוליים פשוטים יותר, שמשתמשים בקיבוליות עצמית במקום בקיבוליות מוקרנת. מסכי המגע מבוססי הקיבוליות העצמית הללו לא יספקו יכולת להשתמש במחוות מתקדמות, אלא ישמשו לצורך איתור נגיעה פשוט במסך ולצורך ביצוע החלקות פשוטות. בתלות בגודל המסך, ניתן אפילו לבחור ניתן אפילו לבחור להשתמש במקום ב-ASIC במיקרו בקר בכדי לטפל במטלה. בהקשר הזה, יתכן ויתברר שמסכי מגע קיבוליים יכולים להיות כפתרון יעיל יותר, מכיוון שהם אמינית יותר מבחינה מכנית וכן בגלל ששיבוץ כל מה שצריך בתוך מיקרו בקר אחד יכול לחסוך בעלויות.
גם ממשקי משתמש קטנים יותר, כגון ממשקי הפעלה עם תצוגת תווים קטנה יותר ומקלדת נומרית קטנה יותר, הינם אידיאליים עבור מגע קיבולי. ממשקים אלה בדרך כלל קטנים יותר וניתן להסתפק ביחידה מרובת שבבים אחת שיכולה לטפל בתצוגה, בכפתורי המדע ובתקשורת. משפחת השבבים החדשה של פריסקייל, ה-S08P, הנה אידיאלית לסוג המטלה הזה
מכשירי חשמל ביתיים
מכשירי חשמל ביתיים ממשיכים להתפתח ולהציג ממשקים חלקים ומושכים יותר. יש כבר מקרים בהם משבצים ממשקי מגע מבוססי טאבלט במקררים מהקצה הגבוה בשוק. למרות שזה קורה בתחום המקררים, המגמה הזו הזה לא תתרחש בהכרח גם במכשירי חשמל אחרים. המקרר הוא מקרה מיוחד מכיוון שהוא ממוקם במרכז המטבח, חדר שלפי סטנדרטים רבים הוא חדר חברתי. מכשירים אחרים פשוט ייהנו מקלות השימוש ומהתצוגה המשופרת שמספקים ממשקי מגע. אנחנו כבר רואים כיצד ממשקי מגע מופיעים במכשירים נוספים כגון תנורים, מכונות כביסה, מייבשים ועוד.
יש שני כוחות שמניעים את השינויים הללו: ירידת העלויות של חישת מגע המבוססת על מיקרו בקר קשיח (בניגוד לצורך במספר מרכיבים) וירידת העלויות של החיבורים האלקטרו-מכניים. המיכון הוא הסיבה שבגללה ממשקי מגע נכון להיום הם נחלתם של מכשירים חשמליים יקרים בלבד. בתנור, חוגת טמפרטורה מכנית משמשת כממשק המשתמש וכמחבר המכני. במקרה של חישת מגע, חיישני המגע מספקים רק קלט דיגיטלי, והיחידה מרובת השבבים צריכה להשתמש במידע הזה כדי להדליק להבה, לפתוח שסתומים, וכדומה. מרכיבים אלה יקרים. במכשירים חשמליים, מה שבסופו של דבר יניע את השינויים הללו הם סטנדרטים. לדוגמה, בלנדר לא ישתמש בשום דבר להוציא חוגה ומנוע אוניברסאלי (כמו מחוון מגע ומנוע BLDC) עד שסטנדרטים חדשים יידרשו מכירת בלנדרים שמספקים יעילות גבוהה יותר בשימוש בחשמל וכן ירעישו פחות מבחינה אקוסטית.
אתגרים
חישת מגע קיבולית סובלת ממספר בעיות מורשות שבדרך כלל נפתרות או ממוזערות בעזרת שילוב של טכניקות תוכנה וחומרה.
האתגר החשוב ביותר עבור מערכות מגע קיבוליות הוא הרעש החשמלי. מערכות מגע צריכות להיות קשיחות, הן צריכות לעבוד תחת תנאי רעש קשים ואסור להן לזהות נגיעות שגויות שיכולות לגרום לפעולות בלתי צפויות. יש הרבה מאוד טכניקות זיהוי מגע, כשכל אחת מהן פותרת את בעיות הרעש בדרך אחרת, אבל באופן כללי, פתרון מגע טיפוסי יכלול כמה רמות של חומרה מותאמת לצורך המטרה הזו. קיימות גם כמה טכניקות עבור זיהוי מגע מבוסס תוכנה. לדוגמה, פריסקייל מציעה טכניקה שמכונה ATL (ספריית זמן מתקדמת) שנגזרת ממדידת זמן הטעינה של קיבוליות אלקטרודות המגע באמצעות מעגל RC המשתמש בפיני קלט/פלט למטרה כללית (GPIO) פשוטים. טכניקה זו, כמו גם פונקציות מציאת ממוצע מתקדמות, סינון וממשק אדם מכונה, משובצים בתוך ספריית תוכנת חישת המגע (TTS). ספרייה זו מטפלת בכל תפקודי המגע ומעבירה את התוצאות באמצעות תקשורת חוזרת מעשית אותה יכולים המתכנתים ליישם בקוד מותאם. הבעיה בטכניקות מגע המבוססות על תוכנה בלבד היא שהן פחות קשיחות ואיטיות יותר ליישום מאשר טכניקות הנעזרות בחומרה.
פריסקייל מספקת מספר מיקרו בקרים ממשפחות ה-8 סיביות (S08) ועד ה-32 סיביות (Kinetis מבוסס ה-ARM ו-Coldfire עם ליבת V1) עם מודול קלט חישת מגע (TSI). מודול זה מטפל בחישת המגע על ידי שימוש במקורות זרם קבוע כדי לגרום לאלקטרודות לספק תנודות יחסיות לקיבוליות שלהן. ספריית תוכנת חישת המגע יכולה גם היא לפעול עם מודול ה-TSI, ואפילו עם מודול TSI ופיני קלט/פלט למטרה כללית בו זמנית.
שחקניות בתחום המכשירים החשמליים הביתיים יציעו חדשנות על ידי שילוב תמיכה במספר גדול יותר של אלקטרודות, סריקה מהירה יותר, קשיחות גבוהה יותר והורדה נוספת בעלות הפתרון.
בצד התוכנה, ספריית תוכנה אידיאלית תשתמש בחתימת הזיכרון הקטנה ביותר שאפשר, אבל תציע יותר תכונות. ספריית תוכנת חישת המגע, לדוגמה, יכולה לבצע הידור פנימה והחוצה של מספר תכונות, כך שהמפתחים יכולים לכוונן את השילוב המיטבי של התכונות כנגד השימוש בזיכרון/משאבים. תכונה נוספת, שמקבלת יותר ויותר חשיבות בספריות של תוכנות חישת מגע, היא כיול אוטומטי של סף המגע. בדרך כלל, בעת שמשלבים מגע ביחידה מרובת שבבים, המפתחים צריכים להריץ שיטת כיול באמצעותה הם מודדים את רגישות המערכת, ובהתאם לכך מגדירים סף שמעליו ספריית המגע מגדירה את האלקטרודה ככזו “שנגעו בה”. לתהליך זה יש מספר חסרונות. אחד הוא העובדה שהוא מורכב ואינו מדויק (מכיוון שאלקטרודות, בניגוד לקבלים אידיאליים, נוטות להשתנות עם הזמן, בגלל מידות חום וכדומה). השני הוא העובדה שהשינויים הסביבתיים הטבעיים באלקטרודות המגע יכולים, עם הזמן, לגרום לסחיפה בכיול ולהוביל לפעולה לא נכונה. כדי לטפל בבעיה הראשונה, המורכבות, יצרנים מציעים כלים וויזואליים שמאפשרים לראות את ערכי הקיבוליות בפועל ובזמן אמת, ואז אפשר לקבל החלטות טובות יותר לגבי ערכי הסף. כדי לטפל בבעיה השנייה, ספריות מגע כוללות יכולת לעקוב אחרי קו בסיס, שיטה שבאמצעותה הספרייה באופן אוטומטי עוקבת אחרי השינויים האיטיים בקיבוליות לאורך הזמן, ומזיזה את מדידת הבסיס באופן דינמי, וכך הסף הופך לערך דלתה, במקום ערך גס וקשיח, שמושווה לקו הבסיס הדינמי. מידע נוסף אודות פתרונות המגע של פריסקייל ניתן למצוא באתר.
דורות חדשים של פתרונות מגע יציעו תפקודיות כיול אוטומטי או כוונון אוטומטי. פונקציה זו תנתח את התנאים ואת הרעש ואת קו הבסיס הקיים במערכת, ובאמצעות הנתונים הללו תקבע את סף המגע המיטבי בהתבסס על מספר חזרות של קלט מצד המשתמש. כך, שבעצם היא תלמד את הכיול תוך כדי עבודה. מערכות אלו יהיו חסינות בפני השפעות הזמן על האלקטרודות מכיוון שכיול מחדש אוטומטי יתבצע באופן קבוע.
אתגר אחרון שחשוב לציין היא עמידות בפני מים. מים מהווים בעיה גדולה עבור מערכות מגע מכיוון שיש להם את היכולת לשנות את תפיסת הקיבוליות של האלקטרודה בדומה למגע אצבע. מים מלוחים, כמו זיעה, יעילים בכך במיוחד. פתרונות מגע, במיוחד במקרה של שוק המכשירים החשמליים הביתיים, צריכים להיות מסוגלים להבחין בין מים ומגע אמיתי.
מסקנות
במאמר זה ראינו כיצד ממשקי המגע ממשיכים להתפתח ולהופיע ביישומים רבים יותר. למרות שקיימות טכנולוגיות מגע אחרות, מגע קיבולי הוא פתרון פשוט ובעל עלות נמוכה ליישום. רוב החיישנים מיושמים כיום במיקרו בקרים, כשהרכיב החיצוני היחיד הוא האלקטרודה עצמה שיכולה להיות פשוטה ליישום כמו שרטוט של שטח נחושת בלוח מעגל מודפס. עם יותר פתרונות קניין רוחני מתקדמים בתחום המגע שמשובצים במיקרו בקרים ועם תוכנה חדשה, ממשקי מגע קיבוליים הופכים לקלים ליישום ולחלק פחות פולשני במערכת, כך שמיקרו בקר שמפעיל את ממשק המשתמש מכונה יכולה גם לטפל במטלות אחרות של המערכת, וכך להפחית עלויות ולשפר את האמינות.
כמו כן ראינו שיש מספר אתגרים חיצוניים לממשקי מגע שהופכים לשכיחים יותר בשוק המכשירים החשמליים הביתיים, שרובם קשורים לגידול בזמינות ולהקטנה בעלויות של פתרונות הידראוליקה ואלקטרו-מכניקה. כשזה יקרה, וכשהסטנדרטים יתחילו לדרוש זאת, חישת מגע תהפוך לרכיב שכיח יותר גם במכשירים חשמל ביתיים שבקצה התחתון ובתחום הביניים של השוק.
מאת: Yan Vainter, Freescale