










מספר גובר של מוצרי אלקטרוניקה במגזרים צרכניים, רפואיים, של רכב ואף תעשייתיים משתמשים בטכנולוגיות של אותות מהירים עבור תקשורת נתונים, דיבור, שמע והדמיה. אם כי סוגי יישומים אלה מעבדים אותות בעלי רוחבי-פס שונים ומשתמשים בארכיטקטורות-המרה שונות בהתאמה, הם חולקים מספר מאפיינים כאשר מדובר בהשוואה בין ADCs (ממירי אנלוגי לדיגיטלי) נבחנים ובהערכה של ביצועי המימושים הספציפיים. בפרט, מתכננים הפועלים בסוגי יישומים נפרדים אלה מודאגים ממספר מאפייני ביצועי AC של ממירים המשותפים המסוגלים לקבוע את גבולות הביצועים של המערכות.
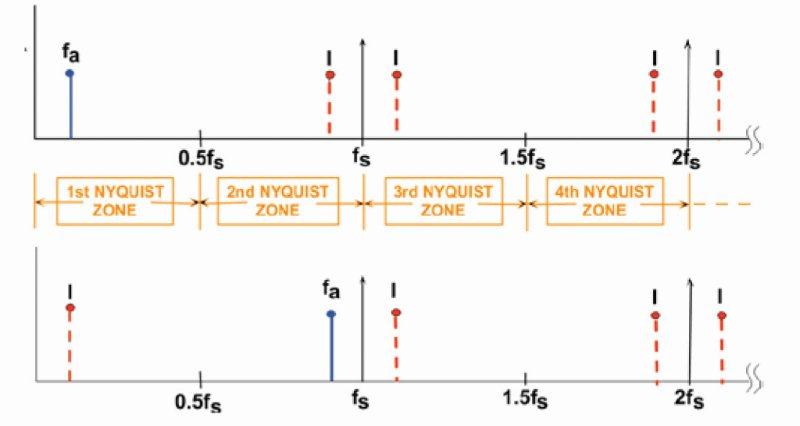
איור 1: דוגם גורם שתמונות (אדומות) של אות תחום-הבסיס fa (כחול) יופיעו בהיסט מתדר הדגימה fs וההרמוניות שלו (A). ההיסטים הספקטרליים שווים ל-±fa. ספקטרומים של אותות, רעש והפרעות הנוצרים קרוב לקצב הדגימה מופחתים לתחום-הבסיס (B). התמונות יופיעו גם באזורי Nyquist העליונים.
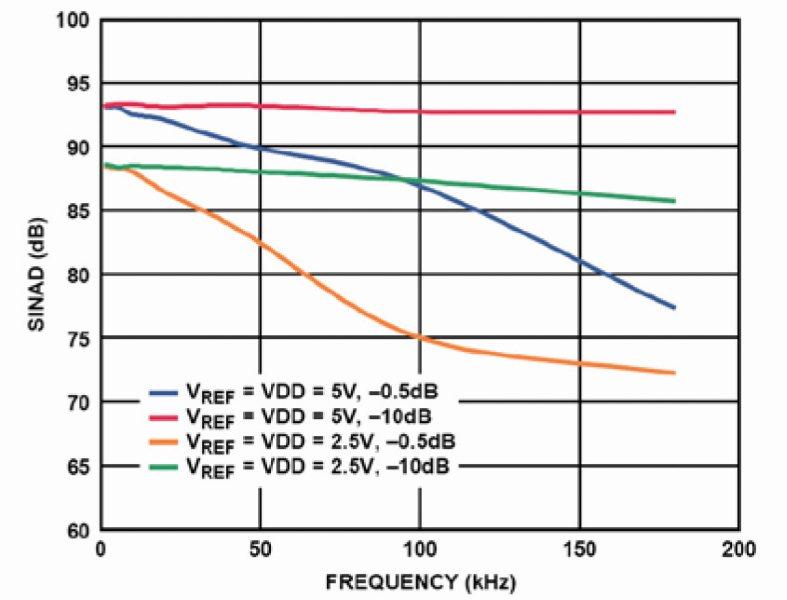
איור 2: אם כי ENOB מספק השוואה שימושית (אם כי גסה) בין ADCs מהירים נבחנים, עקומות אופייניות המתארות את ה-SINAD לעומת התדר נותנות מבט משמעותי יותר אל ביצועי הממיר.
כימות
כל ה-ADCs מקבלים אותות מבוא הרצופים בזמן ובאמפליטודה ודגימות מכומתות במוצא בדגימות בזמנים דיסקרטיים. הפונקציות הכפולות של ה-ADC – כימות ודגימה – מספקות המרה יעילה מתחום האותות מאנלוגיים לדיגיטליים אך לשתיהן יש השפעות בהקשר לביצועי ה-AC של הממיר.
מאחר שלהופכים-לדיגיטלי יש רק מספר סופי של קודים בתוכם ניתן לנתח את אות המבוא הרציף, המוצאים שלהם מפיקים פונקציית שגיאה בצורת גל שיני-מסור. קצות שיני המסור מתאימים להעברת קודי ה-ADC.
כדי לאמוד את השפעת תרומת הרעש של שגיאת הכימות במקרה הטוב ביותר, הנח מבוא גל סינוסי בסקלה מלאה עבור ממיר אנלוגי לדיגיטלי מושלם: ![]()
כאשר q הוא הגודל של LSB אחד ו-N הוא מספר הביטים. אמפליטודת ה-RMS של צורת גל זו היא פשוט האמפליטודה מחולקת בשורש הריבועי של 2.![]()
ורעש הכימות RMS הוא
![]()
היחס בין האות RMS המלא לרעש הכימות RMS נותן SNR אידיאלי של ה-ADC, הניתן לבטא בדציבלים:

(משוואה 1)
זכור שביטוי זה נותן את הגבול התיאורטי עבור ממיר של N-ביטים. מכמתים אמיתיים אינם מגיעים לרמת ביצועים זו ולממירים אמיתיים יש מקורות רעש נוספים, אבל אתה יכול להשתמש במספר זה לשם ייחוס בו ניתן לשקול ADCs נבחנים.
דגימה
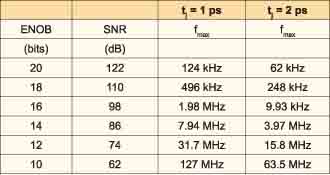
טבלה 1: השוואה בין מערכות בעלות זמני ריצוד השונים פי שניים
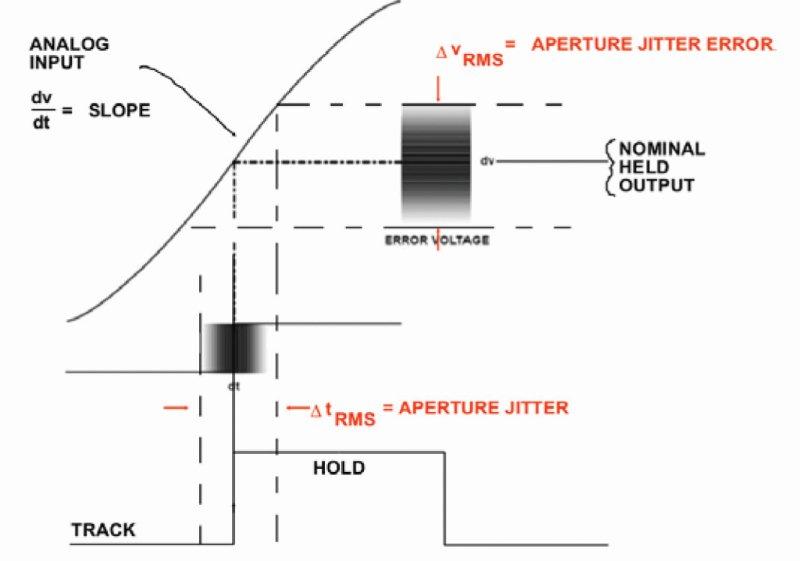
איור 3: ריצוד המפתח – אי-ודאות בזמן הדגימה – יוצר אמפליטודת רעש התלויה בתדר האות בשל סיבוב (slewing) האות בזמן הריצוד.
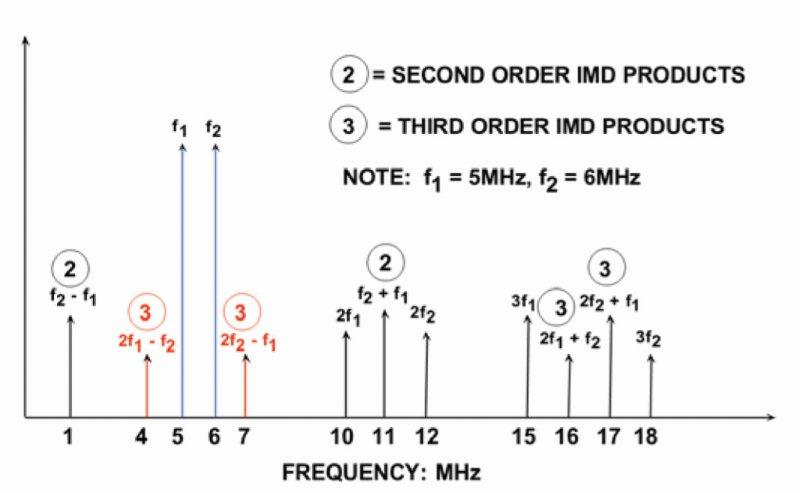
איור 4: אות מבוא דו-צלילי של 5 מגה-הרץ ו-6 מגה-הרץ מציג HD2 (ב-10 מגה-הרץ ו-12 מגה-הרץ), HD3 (ב-15 מגה-הרץ ו-18 מגה-הרץ), IMD (ב-1 מגה-הרץ ו-11 מגה-הרץ) ו-IMD3 (ב-4 מגה-הרץ ו-7 מגה-הרץ). מתוכם, מוצרי ה-IMD3 הם הקשים ביותר לניחות בעזרת מסנן נגד מדרוג בשל הקרבה הגדולה שלהם לאותות המקור.
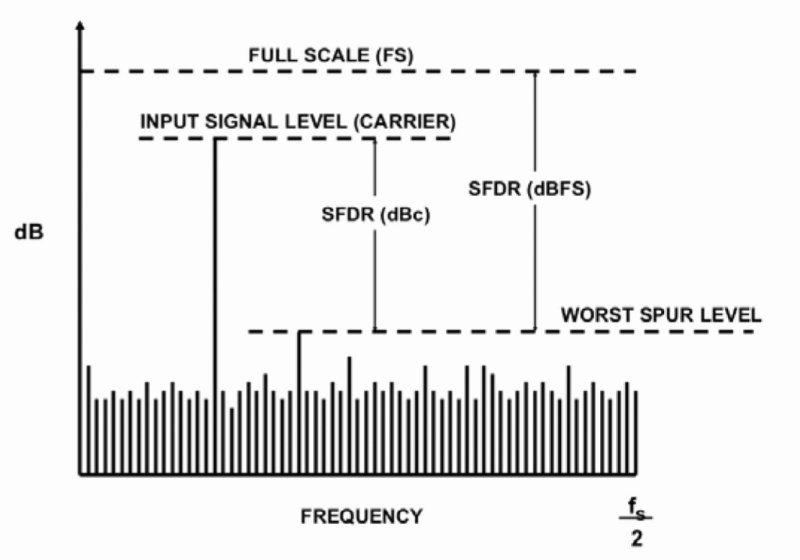
איור 5: יצרני ממירים יכולים לפרט ביצועי SFDR ביחס לתחום המלא של הממיר (dBFS) או ביחס לאמפליטודת אות-מבוא ספציפית (dBc). וודא שהממיר הנבחן מפורט בצורה אחידה לפני ביצוע השוואות מספריות.
בין תכונות הדוגמים, הידועה ביותר היא המאפיין שלהם של מדרוג (aliasing) אנרגיית אות המופיעה בתדרים גבוהים ממחצית קצב הדגימה – fs/2. גבול מחצית קצב הדגימה זה, המכונה תדר Nyquist, משמש לחלוקת הספקטרום בקטעים שווים בגודלם המכונים אזורי Nyquist. אזור ה-Nyquist הראשון משתרע מ-DC עד fs/2. אזור ה-Nyquist השני תופס את הספקטרום בין fs/2 ו-fs וכד’.
למעשה, דוגמים ממדרגים אותות ברוחב כל אזורי Nyquist. לדוגמה, תמונות של אות בתחום-בסיס בתדר fa יופיעו ב-fs+-fa, 2fs+-fa וכו’ (איור 1a). בדומה, אותות המופיעים סמוך לתדר הדגימה יומרו מטה לתדר ה-Nyquist הראשון. תמונה של אות זה תופיע גם באזורי Nyquist השלישי והרביעי (איור 1b). כך שדוגם בעל אנרגיית אות מבוא באזור Nyquist אחר מאשר זה שאתה מתעניין בו יפיק תמונה של האות הזה באזור Nyquist שאתה חפץ בו פשוט על-ידי מדרוג התמונה.
אנרגיית האות מחוץ-לתחום המוצגת כ-fa (איור 1b) לא חייבת לנבוע ממקור אות מכוון. במקום זאת, אנרגיה זו יכולה לנבוע ממקורות רעש, הפרעה מחוץ-לתחום או מוצרי עיוות המיוצרים על-ידי גורמים במעגל הפועלים על אות המבוא המכוון. זהו שיקול חשוב כאשר קובעים את ביצועי העיוות הדרוש עבור היישום שלך.
ניתן להקטין את כמות אנרגיית האות מחוץ-לתחום הזמינה לדוגם על-ידי הכללת מסנן תחום-בסיס נגד-מדרוג בשרשרת האות לפני המבואות של הדוגם. אם כי, תיאורטית, ניתן לדגום רק בכפליים התדר הגבוה ביותר בו אתה מעוניין על-ידי דיגיטיזציה, מסנני “קיר לבנים” (brickwall) – מסננים בעלי תחום העברה אפס – לא קיימים במישור האנלוגי. דגימת-יתר – דגימה בתדר גבוה מ-2fs מספק מרחב ספקטראלי מסוים עבור תחום ההעברה של המסנן נגד-מדרוג.
אם רעש הכימות של ה-ADC איננו קשור לאות המבוא AC, הרעש מתחלק לאורך אזור Nyquist הראשון. במקרים כאלה דגימת-יתר מקטינה את רעש הכימות היעיל על-ידי הרחבת אזור Nyquist, והגדלת ה-SNR (יחס אות לרעש) ב-3dB עבור כל הכפלה של קצב הדגימה. דבר זה מניח מסנן נגד מדרוג בעל פס-מעבר קבוע. עם דגימת יתר מספקת, המסנן נגד מדרוג יכול לנחת את תוכן האות מחוץ-לתחום כך שהתמונות המדורגות שלהם נשארות מתחת לרצפת הרעש.
שים לב שאם אות המבוא ננעל על תת-מכפיל שלם של תדר הדגימה, רעש הכימות לא יופיע יותר כפילוג אנרגיה אחיד לאורך אזור Nyquist. במקרה זה, רעש הכימות יופיע כקבוצה מעל ההרמוניות של האות. בשל כך, יש לשקול בזהירות את המאפיינים הספקטראליים של אות היישום שלך כאשר בוחרים קצב דגימה.
SINAD ו-ENOB
אם מוצרי העיוות והממודרגים של התוכן מחוץ-לתחום אינם נשארים מתחת לרצפת הרעש אזי הם תורמים ל-SINAD (signal to noise and distortion) (יחס אות לרעש ועיוות). דף נתונים של ממיר יציג את ה-SINAD ב-dB בתנאים נתונים של אות המבוא. ה-ENOB (effective number of bits) – מספר הביטים היעיל, אולי מפרט ה-AC המצוטט ביותר עבור ADCs, הוא פשוט ה-SINAD המבוטא בביטים במקום ב-dB.
(משוואה 2)
במקרים בהם מוצרי העיוות ואנרגיית האות הממודרג נשארים מתחת לרצפת הרעש, SINAD=SNR. במקרה זה, משוואה 2 היא פשוט סידור מחדש של משוואה 1, עם פיתרון עבור N. המקרה השכיח ביותר הוא כאשר SINAD<SNR. בגלל שה-SINAD של הממיר תלוי בתנאי ההפעלה והאות, ה-SINAD (ובהתאמה, ה-ENOB) של היישום שלך תלוי באופן בו הוא מזין את ה-ADC.
אם כי מצוטט לעתים קרובות, ה-ENOB אינו מספיק כדי לתאר ביצועים של ממיר מהיר. ממירים מהירים ידועים כמרובי-פרמטרים ושום מספר בודד לא יוכל לקלוט את כל מה שדרוש לתאר לטבלת מפרטים מלאה. ENOB אכן מהווה נקודת התחלה סבירה לשם השוואה בין ממירים מבחנים כל עוד אינך תלוי מידי במשמעות המספר.
יותר בעלות ערך הן עקומות האפיון של SINAD כנגד תדר, אותם הרבה ממירים מציגים בדפי הנתונים שלהם (איור 2). הם מאפשרות לזהות לפחות ביצועים אופייניים בתדרים בעלי עניין ליישום שלכם במקום בתדרים נקודתיים שיצרן הממיר בוחר עבור טבלת המפרטים שבדף הנתונים.
רעש ריצוד מפתח (Aperture Jitter Noise)
הדיון אודות רעש הכימות אשר הוביל למשוואה 1, כאמור, הניח מספרת אידיאלי. מקורות האותות החופשיים מרעש והשעון היו כלולים בהנחה זו. במעגלים מעשיים, האותות מגיעים למבואות ה-ADC עם מוצרי רעש ועיוות שנתרמו כבר על-ידי שלבי עיבוד נתונים קודמים. תוכן הרעש איננו קשור בד”כ עם רעש הכימות ולכן הוא מתווסף כסכום שורשים ריבועיים:
![]()
כאשר הוא הרעש ממקור תורם במערכת של m מקורות בלתי קשורים.
אחד ממקורות הרעש התורמים נובע מאי-הוודאות בתזמון קצה שעון הדגימה, הגורם לרעש ריצוד מפתח. רעש זה נובע מהעובדה שהדוגם לוכד אות AC – תוך כוונון אל מטרה נעה, כביכול. שינויים בתזמון קצה הדגימה גורמים לפילוג סטטיסטי של אמפליטודות שהדוגם לוכד – רעש (איור 3). ככל שתדר האות גבוה יותר, שיפוע האות או קצב הסבב (slew) גדול יותר, ולכן, גדולה יותר שגיאת האמפליטודה הנובעת משינוי נתון בתזמון הקצה. לכן, ההשפעה של כמות נתונה של ריצוד המפתח תלויה בתדר האות.
ה-SNR בשל ריצוד המפתח הוא
(משוואה 3)
![]()
אשר f היא תדר האות ו-tj הוא ריצוד המפתח RMS. לעתים קרובות, כאשר בוחרים בין ADCs נבחנים השאלה היא איזה ריצוד מפתח מרבי היישום שלך יכול לסבול בהתחשב בדרישות ה-SNR עם אותות בעלי תדר נתון. שינוי במשוואה 3 נותן ![]() (משוואה 4)
(משוואה 4)
שים לב שבנוסף למקורות הריצוד בתוך הממיר, קיימים מקורות ריצוד הנובעים ממעגל היישום שלך. הביצוע הנקי שהמעגל שלך משיג, לכן, הוא פונקציה גם של בחירת הממיר שלך וגם של איכות ההיבטים האחרים של התכנון שלך, בעיקר מעגל הפקת השעון ותסדיר הכרטיס של המעגל.
כדי לקבל מושג כיצד הריצוד משפיע על תדר האות המרבי עבור ENOB נתון, עיין בשתי מערכות בהן 1ps ו-2ps של רעש ריצוד, בהתאמה, שולטים על פרמטרים מגבילי- ביצועים אחרים. סידור מחדש של משוואה 4 מאפשר לנו לחשב, עבור ריצוד נתון, את תדר האות המרבי הגורם ל-ENOB (או SNR) מסוים.
מוצרי עיוות
אי-ליניארויות בתוך שרשרת האותות מעלות מספר מוצרי עיוות, בעיקר HD2 (עיוות בעל הרמוניה שנייה), HD3 (עיוות בעל הרמוניה שלישית), IMD2 (עיוות אפנון הדדי בעל סדר שני) ו-IMD3 (עיוות אפנון הדדי בעל סדר שלישי). עיוות במעגלים ליניאריים נוטה לגדול בהדרגה כאשר האות מתקרב לקצות תחום הפעילות הליניארית של המרכיבים האקטיביים. זה איננו המקרה ב-ADCs שם מרווחי הקוד מסתיימים לפתע.
חשוב, לכן, להקציב טווח מספיק במבוא כדי להתאים לאמפליטודות המבוא החזויות עבורן אתה מצפה לכימות בעל עיוות נמוך, במיוחד כאשר מעבדים אותות רחבי-פס מרוכבים. לבסוף, הבחירה שלך של אמפליטודת מבוא נומינלית נובעת מאיזון המרווח של האות כדי למנוע קיטום (clipping) לעומת הרצון למטב את ה-SNR.
כפי שרומז השם, עיוות הרמוני מפיק מוצרי אותות במכפלות של תדר האות. בניגוד לכך, עיוות הדדי (intermodulation)נובע מאי-ליניארויות באותות הכוללים שני תדרים או יותר – למעשה כל צורת –גל מרוכבת – היוצרים סכומים והפרשים של תדרי המבוא.
ביישומי פס-צר, מסנן נגד-מדרוג מכוון היטב יכול לנחת מוצרי עיוות הרמוני אחדים ואף את המרכיבים הנוספים של ה-IMD2 (איור 4). מצד שני, המרכיבים המפחיתים של ה-IMD3, המופיעים ב-2f2-f1 ו-2f1-f2, הם מזיקים מאחר שהם יכולים להופיע בתוך ספקטרום האות.
SFDR
SFDR (spurious-free dynamic range) הוא פשוט מדידה של המוצר הספקטראלי הגרוע ביותר בהשוואה הן לתחום הסקלה המלאה של הממיר (dBFS) והן לרמת אות המבוא (dBc). וודא שזיהית הן רמות הייחוס והן תנאי ההפעלה והאות כאשר משווים ADCs. השוואות ישירות בין מפרטי דף-הנתונים דורשות התאמה בין הייחוסים והאותות (איור 5).
אם כי SFDR מופיע כנתון מספרי בטבלאות המפרטים של הממירים, המדידה היא בעצמה פרמטרית בקצב הדגימה, אמפליטודת האות ונקודת ההפעלה במוד-משותף. עיין בעקומות האופייניות של הממרים הנבחנים כדי לקבל מושג על ביצועי הממיר בתנאי הפעלה ואותות דומים לאה שהיישום שלך ידרוש.
Analog Devices Ltd.
