














Anja Schutz,
Maxon Motor ag
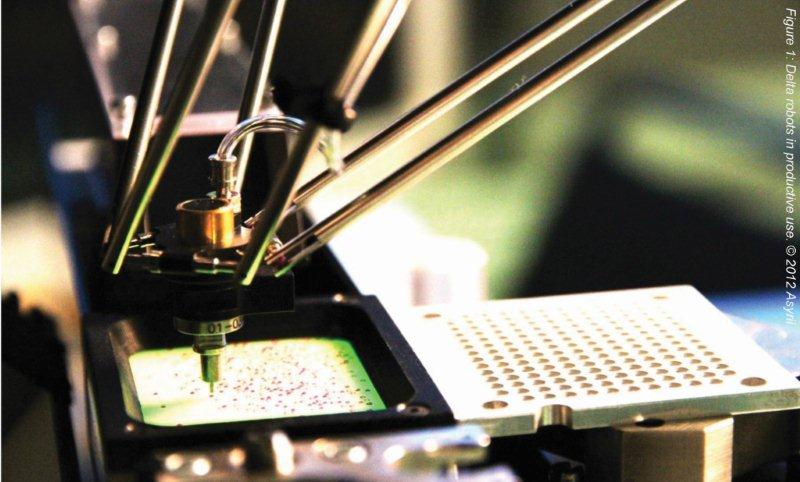
כיום מטלות של מיקרו-מכלול שונות מציגות אתגרים עוד יותר קשים לטכנולוגיית ההינע. בשעה שמיקרו-רכיבים ומערכות הולכים וקטנים בהתמדה, הפיתוח של מערכות ייצור בממדים מאקרוסקופיים מפגר לעתים קרובות. חברה שווייצרית ערכה מהפיכה בשוק באמצעות משפחה שלמה של רובוטי Delta. מנועי maxon חזקים מבטיחים פעולה דינמית בדיוק גבוה.
Asyril, חברה ממערב שווייצריה, מתמחה בפיתוח ושילוב של מערכות מכהטרוניות עבור הטיפול האוטומטי המהיר והגמיש של רכיבים קטנים, לדוגמה רכיבי מיקרו-סקאלה עבור מיקרו-, ננו- וביוטכנולוגיה. החברה הוקמה על-ידי המומחה למיקרו-רובוטיקה Dr. Alain Codourey ב-2007 והיא נבנתה על-יסוד הידע הטכנולוגי של קבוצת CSEM ו-CPA. להקמת החברה קדמה שאלת – הליבה האם אפשר לבנות מיקרו-רובוט בגודל 100x100x100 ממ”ק ומה תהיה הקינמטיקה האידיאלית עבור רובוט מסוג זה. עוד לפני 10 שנים, חוקרים ב-CSEM (Swiss Center for Electronics and Microtechnology) שמו לב על ההפרש הגדל והולך בין מיקרו-רכיבים ההולכים וקטנים לעומת ממדי מערכות הייצור הנשארות קבועות. בשעה שהמבנים המכניים של רובוט הם קלים למזעור, דבר זה תקף עבור ההינע רק במידה מוגבלת. “במערכות מקובלות, המנועים נשארים גדולים מאוד בהשוואה לרכיבים המכניים. כתוצאה, הקינמטיקה המקובלת של רובוטים בעלי זרוע מחוברת במפרקים, לדוגמה, איננה מתאימה גם, משום שמנועים גדולים עדיין דרושים בחיבורים”, מסביר Dr. Alain Codourey.
כדי למצוא פתרון להבדל הולך וגדל זה, המומחה למיקרו-רובוטיקה Codourey וצוות המחקר שלו ב-CSEM ובמחלקה להנדסה ולטכנולוגיית המידע של אוניברסיטת Bern למדעים שימושיים ב-Biel החלו מחפשים מערכות מתאימות יותר לטיפול ברכיבים מיקרו-טכניים. “לבסוף, הגענו למסקנה שמבנים קינמטיים מקביליים הם המבטיחים ביותר עבור המטרה שלנו”, מסביר Codourey.
 עם מטרה זו במחשבה, הושלם תחילה הרעיון של מערכת קינמטית של צירים מקבילים. כדי לשמור על אינרציית המסה נמוכה ככל האפשר, כל הרכיבים נבחרו כעדינים וקלי-משקל ככל האפשר. יתרון גדול של תצורת Delta היא העובדה שאם כי מנועי maxon אחראיים לתנועת המרכיבים הקינמטיים, המנועים עצמם אינם נעים. במקום זאת, המנועים מחוברים למסגרת התמיכה והם מעבירים את התנועה ישירות למבנה. עיקרון הנדסי זה מומש במגוון שלם של רובוטי Delta. ה-“Desktop Delta”, “Power Delta” ו-“Pocket Delta” תוכננו כולם בהתאם לאותו עיקרון בסיסי.
עם מטרה זו במחשבה, הושלם תחילה הרעיון של מערכת קינמטית של צירים מקבילים. כדי לשמור על אינרציית המסה נמוכה ככל האפשר, כל הרכיבים נבחרו כעדינים וקלי-משקל ככל האפשר. יתרון גדול של תצורת Delta היא העובדה שאם כי מנועי maxon אחראיים לתנועת המרכיבים הקינמטיים, המנועים עצמם אינם נעים. במקום זאת, המנועים מחוברים למסגרת התמיכה והם מעבירים את התנועה ישירות למבנה. עיקרון הנדסי זה מומש במגוון שלם של רובוטי Delta. ה-“Desktop Delta”, “Power Delta” ו-“Pocket Delta” תוכננו כולם בהתאם לאותו עיקרון בסיסי.
איור 2: שלושת מנועי maxon EC-I 40 נראים בבירור על הרובוט Pocket Delta של Asyril

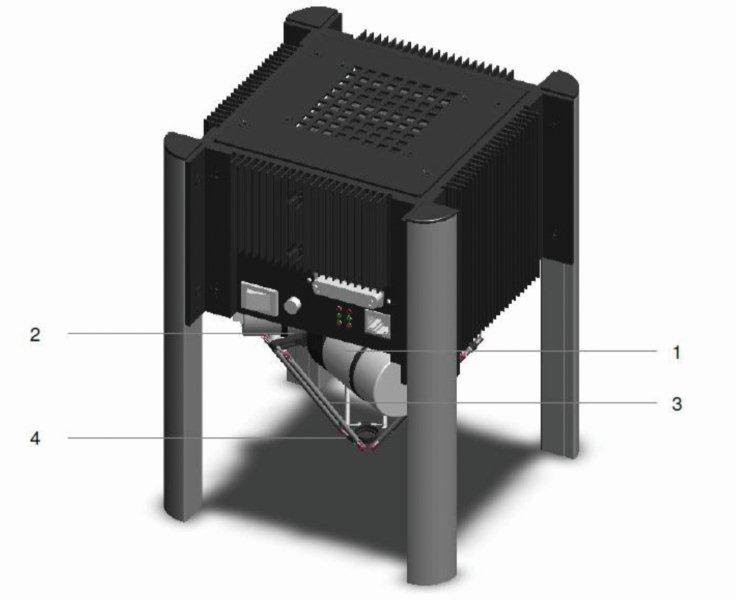
איור 3: ה-Pocket Delta ממונע בעזרת שלושה מנועי maxon המחוברים ישירות למפרקים (2). אלה מחוברים אל המקביליות (3). בפלטפורמה (4) שלוש הזרועות קובעות את הקינמטיקה המקבילית
טכנולוגיית הינע Slimline עבור
מיקרו-מכלולים
לא רק הרכיבים המכניים נאלצו להצטמק, גם ממדי מערכות ההינע צומצמו. במקום המנועים הגדולים בעלי הספק גבוה ופליטת חום גבוהה בהתאמה, ה-Pocket Delta משתמשת במיקרו-מנועים חוסכי-מקום של מנועי maxon. המנגנון המקבילי של הרובוט מוזן על-ידי שלושה מנועי EC-i 40 מורכבים כולם על לוח מעל הרובוט. המשמעות היא שהמסה שיש להניע היא מאוד נמוכה; כתוצאה, הרובוט הוא מאוד דינמי. ה-Pocket Delta זקוק ל-0.33s עבור מחזור pick-and-place יחיד ויכול לכן להשלים שלושה מחזורים בשנייה. תודות לקשיחות הגבוהה של המבנה הקינמטי, לרובוט דיוק חוזר של פחות מ-3 מיקרו-מטרים.
למנועי ה-DC ללא מברשות קוטר של רק 40 ממ’ והספק של 50 ואט. כדי להבטיח שרובוט ה-Delta הוא לא רק מהיר, אלא גם מדויק, יש למדוד את מצב הזווית של המנוע בדיוק רב. לכן המיקרו-מנועים מחוברים ישירות למקודדים סיבוביים בעלי רזולוציה גבוהה לשם גילוי המיקום. יתר על כן, כל מנוע מצויד במעצור תופס מתוכנן על-ידי Asyril. פינים קטנים אוחזים את צירי המנוע בעזרת קפיץ. בשעת הפעולה של הרובוט, פינים אלה נמשכים בעזרת אלקטרו-מגנטים כדי לשחרר את המעצור. בקר הרובוט משולב במלואו בתוך הרובוט והתקשורת מתנהלת דרך ממשק Ethernet. בעזרת התכונות שהוא כולל, הרובוט המיניאטורי מתאים במיוחד למטלות הכוללות הנעה מהירה או הרכבה של רכיבים זעירים. הוא אחד הרובוטים המהירים והמדויקים ביותר בסוגו. יתרון אחר של התכנון שנבחר הוא שלא דרוש “ראש הילוך” עבור ה-Pocket Delta.
רובוטי Pocket Delta משמשים בתעשיות רבות. אולם היתרון המיוחד שלהם הוא בבחירה, ניפוי ומיכון של מיקרו-רכיבים בתעשיית השעונים. פיתרון זה מתאים להרכבת כמעט כל הרכיבים בשעונים מכניים, לדוגמה ברגים, מסמרות, פינים או הילוכים. אך ה-Pocket Delta משמש גם בתחום הטכנולוגיה הרפואית ובתעשיות האלקטרוניקה והמוליכים למחצה. הרכיבים שיש להניע הם בגודל בין 0.5 ו-15 ממ’.
הכתבה נמסרה באדיבות חברת אלקטרונדארט.





