מחזוריות הספק 101: ייטוב השימוש באנרגיה במוצרי חיישן מתקדמים מאת: Mark Looney, Analog Devices
מחזוריות הספק 101: ייטוב השימוש באנרגיה במוצרי חיישן מתקדמים מאת: Mark Looney, Analog Devices
מבוא: מערכות חיישנים משולבות ביותר, מפורטות במלואן, דוגמת חיישן ההטייה () ADIS16209 (ראה נספח), הזמינות במארזים קומפקטיים במחירים אטרקטיביים, מאפשרות למפתחי המערכות להשתמש בקלות בחיישנים המנצלים טכנולוגיות בהן יש להם מעט ניסיון – עם השקעה וסיכון מזעריים. מאחר שהדיוק מוגדר במלואו ברמת הספק נתונה, עשוי להיווצר הרושם שיכולת המפתח להפחית את צריכת ההספק היא מאולצת. אולם, השימוש במחזוריות הספק
(power cycling) מספק סיכוי להפחתת צריכת ההספק הממוצעת ביישומים בהם השימוש באנרגיה חייב להיות מנוהל היטב. מאמר זה מתמקד במחזוריות ההספק והשפעתו על צריכת ההספק הכוללת.
רבים מאתנו גדלו בבתים בהם ההורים האוהבים היו צורחים: “כבה את האור כשאתה יוצא מהחדר! אנחנו לא בעלי חברת החשמל!” ואמנם, הם לימדו אותנו טכניקת ניהול אנרגיה חשובה – מחזוריות הספק – התהליך של ניתוק ההספק מפונקציה בה הוא לא דרוש, דוגמת כיבוי מערכת חיישנים כאשר המדידות אינן דרושות. דבר זה מאפשר צמצום בפיזור ההספק הממוצע, כפי שמכמתת המשוואה הבאה:
PON הוא פיזור ההספק של המערכת במצב התפעול הרגיל. POFF הוא תקורת המערכת במצב off. הוא בסדר גודל של 1 מיקרו-אמפר, בהיותו קשור לזרמים שרידיים, כגון שמירה על מתג כוח או מוד כיבוי בווסת הספק. זמן ה- (TON) הוא כמות הזמן הדרושה למערכת החיישן להידלק, ליצור מדידה רצויה ולכבות בחזרה את המערכת. זמן ה- (TOFF) תלוי בתדירות בה המערכת דורשת מדידות חיישן. אם הספק ה-off הוא הרבה יותר קטן מאשר הספק ה-on, פיזור ההספק הממוצע יחסי במהותו למחזור הפעולה. לדוגמה, אם הספק ה-off הוא אפס ומחזור הפעולה הוא 10%, פיזור ההספק הממוצע הוא 10% מהספק הפעולה הרגיל.
סקירת מערכות חיישנים
מתמרים (transducers) מתרגמים תופעות פיסיקליות – כגון טמפרטורה, תאוצה או מאמץ – לאותות חשמליים. כדי לשמש בצורה נאותה, מרכיבי המתמר דורשים פונקציות תמיכה, כגון גירוי, ייצוב אותות, סינון, התאמת היסט ושבח, וקיזוז טמפרטורה. מוצרי חישה מתקדמים כוללים גם המרה אנלוגית לדיגיטלית ומספקים את כל הפונקציות הללו במארז יחיד, תוך אספקת פונקציות חיישן-לביטים שלמות, מכוילות. על-ידי ביטול הצורך של המשתמש לפתח תכנונים ברמת הרכיב או נוסחאות אפיון ותיקון מורכבות, הן מאפשרות מחזורי תכנון מהירים יותר בהשקעה פחותה. אם כי מוצרי חישה המשולבים ביותר מקטינים את המשימה של נקיטת החלטות תכנון ברמת המעגל, רצוי להבין את הפעולה הפנימית שלהם כאשר שוקלים מחזור הספק כדי להקטין את ההספק הממוצע.
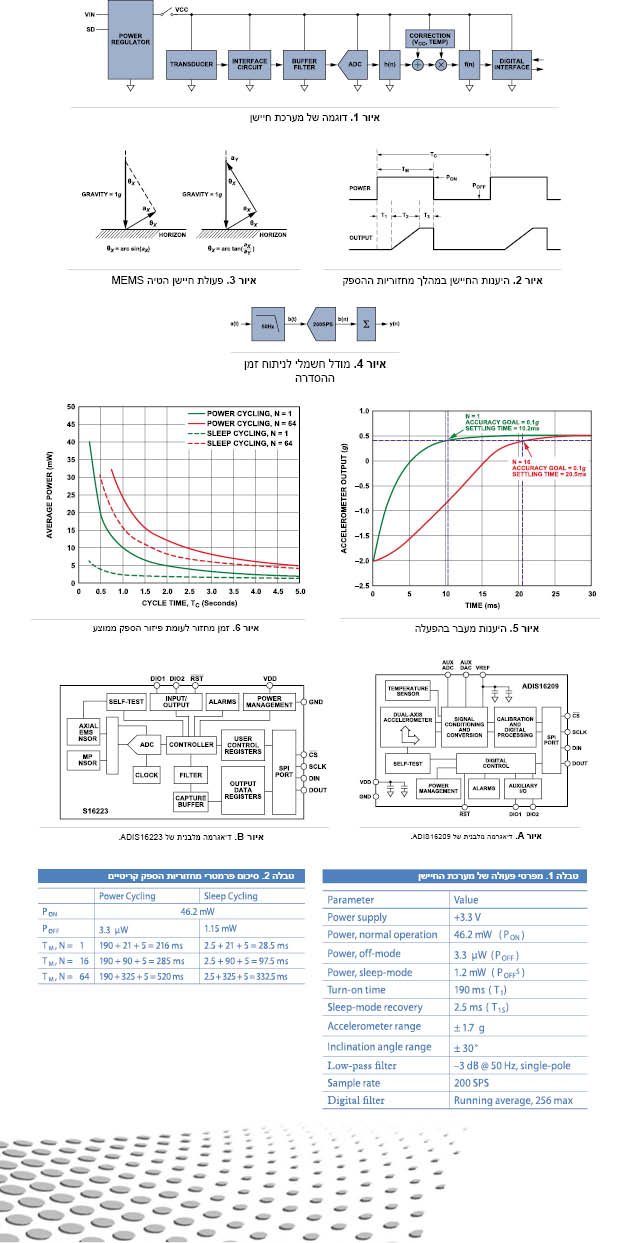
איור 1 מראה רבות מהפונקציות הכרוכות במערכת חישה שלמה. כל מרכיב התמרה דורש מעגל ממשק כדי להמיר את השינוי הפיסיקאלי במרכיב לאות חשמלי המשמש על-ידי רכיבי עיבוד נתונים תקניים. לדוגמה, מדי מאמץ התנגדותי – נגדים העוברים שינוי בהתנגדות כאשר מפעילים עליהם שינוי במאמץ – משמשים לרוב בצורת מעגלי גשרים (בעלי גירוי) כדי להמיר את ההתנגדות המשתנה לאות חשמלי. דוגמה אחרת היא חיישנים אינרציאליים integrated micro – electromechnical systems (), כגון מדי-תאוצה וגירוסקופים. המבנה הזעיר שלהם מגיב לשינויי תנועה אינרציאליים על-ידי שינויי מיקום בין הלוחות, דבר הגורם לשינויים בקיבול בין הקשרים החשמליים. מעגל הממשק עבור מרכיב קיבול משתנה משתמש לרוב בצירוף של דרגות אפנון ופענוח כדי לתרגם את שינוי הקיבול לאות חשמלי.
דרגת החציצה (buffer), המכינה את האות לקראת דרגת המבוא של הממיר אנלוגי לדיגיטלי (analog-to-digital converter – ADC) יכולה לכלול הזזת הרמה, שבח, תיקון היסט, חציצה וסינון. לאחר שאות החיישן הפך לדיגיטלי, פונקציות של עיבוד דיגיטלי מסייעות להעלאת ערך המידע. סינון דיגיטלי (n), מקטין את הרעש ומתמקד בתחום התדר בעל העניין. לדוגמה, מערכת ריפוי – ממוכנת (machine-health) עשויה להשתמש במסנן מעביר-פס כדי להתמקד בחתימת התדר הכרוכה במנגנון שחיקה רגיל. חיישנים אחרים, הזקוקים לייחוס dc יציב, יכולים להעדיף יותר מסנן מעביר-נמוכים.
דיוקי חיישנים עשויים להיות שונים מאוד בין מרכיבי הפריטים. כדי לצמצם את פיזור השגיאה ולהגדיל את ודאות המדידה, מערכות חיישנים כוללות לרוב תהליך כיול המאפיין כל חיישן ותנאים וגירויים ידועים, ומספק נוסחאות מיוחדות-ליחידה המתקנות את המוצא בכל תנאי הפעולה הצפויים. דרגת העיבוד הסופית
(n), מציגה עיבוד ספציפי – לדוגמה הקשר הטריגונומטרי המשמש לתרגום מדידות כובד סטטיות של מד-תאוצה לזוויות התמצאות.
שיקולי מחזוריות הספק
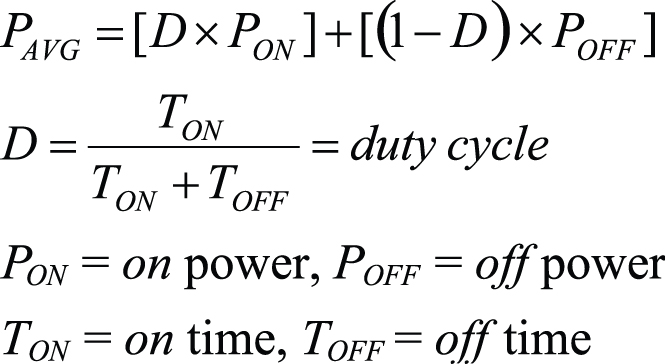
בשעה שהוא מעריך את היעילות של מחזוריות ההספק במערכת חיישנים, המתכנן צריך לקבוע בוודאות את הזמן הדרוש לרכישת נתונים שימושיים. איור 2 מראה כיצד מערכת חיישנים טיפוסית מגיבה בשעה שמחברים אותה למקור כוח. TM הוא זמן המדידה ו-TC הוא זמן המחזור. זמן המדידה תלוי בזמן ההתנעה, T1, זמן ההסדרה (settling time) וזמן רכישת הנתונים, T3.
זמן ההתנעה (start-up) תלוי במעבד המערכת וברוטינות ההתחלה שהוא צריך להפעיל כדי לתמוך בפעולות דיגום הנתונים ועיבוד האותות. כאשר משתמשים במערכת חיישן משולבת ביותר, זמן ההתנעה מצוין בד”כ בתיעוד המוצר. מוצרים מסוג זה מציעים לעתים מוד שינה (sleep) – המספק זמני התנעה מהירים יותר על-חשבון פיזור הניתוק מאשר מוד הכיבוי.
זמן ההסדרה יכול לכלול את ההתנהגות החשמלית של המתמר, רכיבי מעגל הממשק, המסנן ורכיבים פיסיקאליים, כמו גם זמן ההסדרה התרמי והמכני. במקרים אחדים, התנהגויות מעבר אלו מוסדרות במשך זמן ההפעלה, כך שיש להן השפעה קטנה או אפסית על זמן המדידה הכולל. הגישה השמרנית ביותר לניתוח ההתנהגויות, אולם, היא להעריך כי הדבר קורה ברצף (cascade), אלא אם ניתוח ומחקר מתקדם עשויים לתמוך בהשערה החיובית יותר של התנעה והסדרה בו-זמנית.
זמן רכישת הנתונים תלוי בכמה דגימות נתונים דרושות, באיזו מהירות יכול מעבד המערכת לקרוא נתונים וכמה מוקדם המעבד מוכן שוב לאחר שנתונים מדויקים הם מוכנים לרכישה.
דוגמה לניתוח
דוגמה זו מעריכה חיישן הטיה MEMS משולב במלואו כדי לזהות פרמטרים המשפיעים על הדיוק וזמני המדידה במטרה לקבוע את הקשרים החשובים של הספק כנגד ביצועים. ארבעת הצעדים הבאים מספקים מדריך פשוט לתהליך זה.
1. למד כיצד פועל החיישן.
2. רכש מידע רלוונטי מתוך תיעוד המוצר.
3. הערך פרמטרים חשובים שאינם מוגדרים במפורש.
4. פתח קשרי הספק כנגד ביצועים.
1.הבנת הפעולה
מערכת חיישן ההטיה המודגם דומה מאוד למערכת הגנרית שבאיור 1. מד-התאוצה בעל ליבת MEMS כולל הן את מרכיב המתמר והן את מעגל הממשק. אות מד-התאוצה עובר דרך מסנן חד-קוטבי מעביר נמוכים אשר מגביל את רוחב-הפס של האות ל-50 הרץ. ממיר האנלוגי לדיגיטלי פועל בקצב דגימה של 200SPS ומזין את המוצא שלו לתוך דרגת העיבוד הדיגיטלי. הפונקציות של העיבוד הדיגיטלי כוללות מסנן ממצע, נוסחאות תיקון של מזין הטמפרטורה, פונקציה מתמטית לשם תרגום קריאות סטטיות של מד-התאוצה לזוויות הטיה, אוגרי ממשק משתמש וממשק טורי.
כאשר ציר המדידה של מד-התאוצה הוא ניצב לכוח הכובד, המוצא שלו יהיה אפס, בהנחה של שגיאת ממתח אפס. הוא ייצור מוצא של +1g או -1g כאשר ציר המדידה שלו מקביל לכוח הכובד, עם קוטביות תלויה בכיוון שלו. הקשר בין מדידת התאוצה הסטטית וזווית ההטיה הוא פונקציית סינוס או טנגנס פשוטה, כמתואר באיור 3. ניתוח זה מתמקד במוד האופקי (סינוס)
2. לקט מידע רלוונטי מספרות המוצר
טבלה 1 מספקת סקירה של הפרמטרים המשפיעים על מחזוריות ההספק עבור מערכת חיישן מתקדמת. חלק מפרמטרים אלה מופיעים בדפי נתוני המוצר, בעוד אחרים דורשים ניתוח ביחס למטרות ביצועי המערכת הסופית. PON ו-T1 הם פרמטרים מתוך דפי הנתונים. ניתן להשתמש ביתר הפרמטרים כדי להעריך את T2 ו-T3. הספק ה-off-mode נובע מזרם הכיבוי של הוסת הליניארי.
3. השתמש בהנחות מושכלות כדי לכמת גורמי השפעה נותרים
זמן ההסדרה משפיע על הדיוק וקצב המדידה שמערכת חיישן עשויה לשאת. הרבה דברים שונים יכולים להשפיע על זמן ההסדרה, אך ניתוח זה מתמקד בגורמים החשמליים. הערכת זמן ההסדרה דורשת מטרה לביצועים, הנחות יסוד אחדות, ודגם לניתוח היענות החיישן להפעלת הכוח. הנחת היסוד הראשונה היא שהסדרת המסנן מתרחשת לאחר תקופת התחילה (זמן ההפעלה). בעוד שתי תקופות אלו עשויות להיות סימולטניות, הניתוח שלהם ברצף מספק גישה שמרנית יותר בתור נקודת התחלה. איור 4 מספק מודל מפושט לניתוח היענות החיישן להפעלת הכוח.
לאחר הפעלת הכוח, מוצא מד-התאוצה של החיישן (t), מציג היענות מדרגה. מאחר שהחיישן מוזן על-ידי מקור יחיד המוצא שלו יתחיל כנראה באפס ויעבור במהירות לרמה הקובעת את הכיוון שלו. לשם פשטות, נניח שמוצא אפס מתאים לרמת התאוצה המזערית הזמינה. במקרה זה, אנחנו משתמשים ב-2g-, כדי לספק גבול כלשהו מעבר למינימום המפורש של -1.7g. כמו כן, תחום ההטיה המרבי הוא +300, שווה-ערך ל- -+0.5g. צירוף של שני מרווחים אלה, המעבר המרבי שאות מד-התאוצה יבצע בתחילת התהליך הוא
+2.5g. היענות המדרגה של מסנן חד-קוטבי, מעביר נמוכים (t) מוצג בנוסחה הבאה: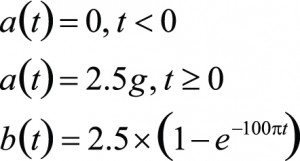
מודל הכולל את המסנן הדיגיטלי דורש גרסה דיסקרטית של (t), יחד עם מודל סיכומי להדמיית המסנן.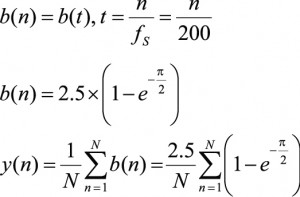
זמן ההסדרה הוא הזמן הדרוש להסדרה לערך הסופי שלו במסגרת דיוק נתון, Ag. איור 5 מראה שתי עקומות היענות מעבר ומציג את זמן ההסדרה עבור כל אחד מהם בדיוק של 0.1g.
בדוגמה זו, (איור 5), תקציב השגיאה מרשה 0.20 מדיוק ההסדרה. נוסחת הסינוס מספקת שיטה פשוטה לתרגום מטרה זו למדידת תאוצה.![]()
מידול נוסחה זו פשוט מאוד בעזרת כלים דוגמת Excel או MATLAB. כאשר משתמשים ב-Excel, המוצא מגיע לרמה בתוך 3mg מ-0.5g בדגימה ה-18 כאשר N=16, ובדגימה ה-65 כאשר N=64. חלוקת כל אחד ממספרים אלה בקצב הדגימה (200SPS) מספקת הערכות של זמן ההסדרה עבור קביעות אלו של 21 מילי-שניות עבור N=1, 90 מילי-שניות עבור N=15 ו-325 מילי-שניות עבור N=64. הנח (אם הדבר סביר) שהשגיאות הכרוכות בהסדרה התרמית זניחות. מאחר שההתקן הנדון מספק היענות מכוילת לטמפרטורה, זוהי כנראה הנחה סבירה. אימות הנחה זו מציע הזדמנות טובה לבדוק את הדיוק כחלק מתהליך האפיון הסופי.
זמן רכישת הנתונים T3 עבור סוג זה של מערכת לא חייב להיות ארוך יותר מאשר מחזור דגימה אחד, מאחר שכל התיקונים והסינון הדרושים מטופלים בתוך ההתקן. כאן, זמן הרכישה יתרום רק 5 מילי-שניות לזמן המדידה הכולל.
4. הקשר בין פיזור ההספק לזמן המחזור
החלק הסופי של ניתוח זה מייחס את פיזור ההספק הממוצע לזמן המחזור, שהוא, בעצם, שווה לכמות הזמן בין אירועי מדידה נפרדים. טבלה 2 מסכמת גורמי המחזוריות ההספק העיקריים, הן המתוארים בדף הנתונים של החיישן או הנוצרים באמצעות תהליך ניתוח פשוט זה, כולל מספרים עבור ההתנעה המלאה (מחזוריות מלאה) והתאוששות במוד השינה (מחזוריות שינה).
החישוב הבא מספק דוגמה מהירה של שימוש בפרמטרים אלה כדי לנתח ולהשוות מחזוריות הספק ומחזוריות שינה עבור מערכת הדורשת קצב מדידה של 1SPS.
מחזוריות הספק:
מחזוריות שינה:
כאן יש יתרון ל מחזוריות השינה. אולם, אם זמן המחזור הוגדל לדגימה אחת לדקה (Tc=60 s), פיזור ההספק הממוצע יהיה 0.2 מילי-ואט עבור גישת מחזוריות ההספק ו-1.2 מילי-ואט עבור גישת מחזוריות השינה. קשר גראפי שימושי בין זמן המחזור ופיזור ההספק הממוצע מוצג באיור 6.
מוד השינה שומר על כל ערכי התיחול תוך ניתוק יתר המערכת. אם כי שמירה על ערכים אלה דורשת הספק מסוים, זמני ההתאוששות הם מהירים יותר מאשר זמני התיחול המלא. חיישן ההטיה ADIS16209 מספק זמן שינה מיתכנת והתעוררות אוטומטית. סוג זה של פיתרון תואם היטב למעבד ראשי שיכול גם לעורר באות נתונים-מוכנים, לקלוט את הנתונים שהוא צריך, ולהורות לחיישן לחזור לישון למשך תקופה קבועה נוספת. דוגמה אחרת של מוצר MEMS המשתמש במוד השינה היא חיישן הרעידות ADIS16223, האוסף ומאכסן נתוני רעידות, חוזר אוטומטית למוד שינה ואז מתחיל ספירה יורדת לאירוע מדידה אחר. סוג זה של חיישן פועל היטב עבור מערכות הדורשות ניטור מחזורי, ללא הצורך להקציב משאבי מעבד כדי לנהל את מודי השינה ואיסוף הנתונים.
ניתוח פשוט זה מספק כמה היבטים שימושיים. במיוחד, ישנם מספר מקרים בהם, למרות ההספק הדרוש במוד שינה, ניהול מוד-השינה עשוי להציע חסכונות באנרגיה. בדוגמה לעיל, מוד השינה הציע שיפור של 4:1 עבור מערכות הזקוקות למדידת הטיה בקצב של 1SPS. כאן, מוד השינה מספק חיסכון בהספק עבור זמני מחזור המדידות עד 6s. עבור מערכות בעלות זמני מחזור מדידות ארוכים יותר, התקורה הנמוכה הכרוכה בניהול מצב הניתוק מאפשרת רמות הספק ממוצע נמוכות יותר.
סיכום
אם בשל שיקולים כלכליים או סביבתיים, הרצון להקטין את צריכת ההספק נראה שהוא כלל-עולמי. הקטנת צריכת ההספק יכולה להקטין את הממדים והעלות של מקורות הספק, כגון ממירי הספק, סוללות ותאי שמש. יתרונות אפשריים אחרים כוללים דרישות תכנון תרמי ומכני קלות יותר, שידורי EMI מונמכים ואומדני השפעה סביבתית נוחים יותר.
טכניקות המושגים והניתוח המוצגות במאמר זה מספקות נקודת התחלה טובה עבור מהנדסים המעריכים מוצרי חיישן משולבים ביותר אך הנמצאים גם תחת לחץ להקטין את צריכת ההספק כאשר דבר זה אפשרי. חשוב יותר, תהליך החשיבה הכרוך בזיהוי וניתוח התנהגויות העשויות להשפיע על מטלות ההספק הכוללות יהיה אף יותר חשוב, כאשר כל תכנון מערכת מציע אפשרויות וסיכונים חדשים. לאחר השלמת הניתוח הראשוני, יתכן שהפתגם הרוסי “האמן, אך בדוק” מסכם בצורה הטובה ביותר את ההצלחה במימוש הסופי. עקוב אחר הנחות היסוד, כגון דיוק ההסדרה (3 mg) והאם ההסדרה התרמית תשחק תפקיד כלשהו. כאשר חומרה מתאימה זמינה, בחן פתרונות אלה בתנאים התואמים קרוב ככל הניתן את השימוש המתוכנן. לבסוף, בדיקת הנחות אלה תוסיף אמינות ותעדן הנחות חדשות לקראת ניתוח עתידי של טכניקות של ניהול הספק.
נספח
מד ההטיה כפול-הצירים ADIS16209 iSensor® r (איור A) מספק מוצא דיגיטלי יחסי לסיבוב במישור אחד המקביל לכוח הכובד של כדור הארץ (מוד אנכי) בטווח של ±1800, או שני מישורים המשיקים לכוח הכובד (מוד אופקי) בטווח של ±900. ה-ADC על-שבב הופך לדיגיטלי את מוצא מדי-התאוצה ®iMEMS, את חיישן הטמפרטורה הפנימית, מקור ההספק ומבוא אנלוגי נוסף, ומספק את הנתונים דרך ממשק תואם-SPI. רגישות, קצב דגימה, רוחב-פס וספי אזעקה ניתנים כולם לתכנות דיגיטלי. ההתקן המושלם פונקציונלית, כולל גם DAC – ביט נוסף, מקור ייחוס מדויק של 2.5 וולט, פונקציית בדיקה-עצמית דיגיטלית וניהול הספק מיתכנת. ה-ADIS16209, הפועל עם ספק כוח של 3.8 עד 3.6 וולט, צורך 36 מילי-אמפר במוד המהיר, 11 מילי-אמפר במוד הרגיל ו-140 מיקרו-אמפר במוד שינה. המוצר הזמין במארז LGA בעל 16 סיומות, מוגדר לטווח בין -400C עד +1250C.
חיישן הרעידות הדיגיטלי iSensor ADIS16223 (איור B) משלב מד-תאוצה iMEMS ±70-g חד-צירי עם מעבד אותות גמיש, בעל הספק נמוך. רוחב-הפס של 22 קילו-הרץ של החיישן וקצב הדגימה של 72.9-kSPS מתאימים היטב ליישומי ריפוי-ממוכנים; מסנן ממצע/מעשר מייטב את הפעולה עבור יישומי רוחבי-פס נמוכים יותר. ההתקן יכול לקלוט ולאכסן 1k דגימות מכל אחד משלושת הצירים תוך שימוש באיסוף נתונים אוטומטי, ידני או קולט-אירועים. הוא גם מודד טמפרטורה ומתח הזנה, קולט שיאים ומספק פונקצייה של אזעקה מבוססת-תנאים. ה-ADIS16223, הפועל מספק של 3.15 עד 3.6 וולט, צורך 38 מילי-אמפר במוד לכידה ו-230 מיקרו-אמפר במוד שינה. המוצר
הזמין במארז 16סיומות LGA מוגדר
מ-400C- עד +1250C.
סימוכין
1. דף נתונים ADIS16209.
2. דף נתונים ADIS16223
אודות המחבר:
Mark Looney הוא מהנדס יישומי iSensor ב-Analog Devices ב-Greensboro, NC. מאז הצטרפותו ל-ADI ב-1998, הוא צבר ניסיון בעיבוד אותות חיישנים, ממירים אנלוגי לדיגיטלי מהירים והמרת הספק dc-to-dc. הוענקו לו תוארי (1994)
ו- (1995) בהנדסת חשמל מאוניברסיטת Nevada, Reno והוא פרסם מאמרים אחדים. לפני שהצטרף ל-ADI, הוא סייע להתניע את ה-IMATS, חברת אלקטרוניקה לרכב ופתרונות תעבורה, ועבד כמהנדס תכנון ב-Interpoint Corporation.