















יישני MEMS אינרטיים משחקים תפקיד משמעותי בהתרחבות המאסיבית של ההתקנים האלקטרוניים האישיים. הממדים הקטנים, ההספק הנמוך, קלות השילוב, הרמה הגבוהה של הפונקציונאליות והביצועים הנפלאים שלהם מעודדים ומאפשרים חדשנות במכשירים כגון טלפונים חכמים, בקרי המשחקים, גששי פעילות ומסגרות של תמונות דיגיטליות. בנוסף, חיישני MEMS אינרטיים שיפרו משמעותית את האמינות והפחיתו עלויות במערכות בטיחות רכב, ואיפשרו להן להתפרס ברוב המכוניות.
ההתקדמויות הרצופות בשילוב הפונקציונלי והביצועים גם סייעו למדי-התאוצה והגירוסקופים של MEMS למצוא את מקומם במערכות תעשייתיות שונות רבות. חלק מיישומים אלה מציעים חלופות זולות למוצרים ושירותים קיימים, בעוד אחרים משלבים חישה אינרטית בפעם הראשונה שלהם. ניטור הרעידות מתפתח כיישום בעל שני סוגי משתמשים. מכשירים מסורתיים המנטרים את מצב המכונות לצורכי תחזוקה והבטחה משתמשים לעתים קרובות בטכנולוגיה פיאזו-חשמלית. ציוד אוטומציה מהיר מנטר רעידות כדי לאתחל בקרת משוב של סיכה, מהירות או מתיחות הרצועה, או כדי לכבות ציוד לשם טיפול מהיר של צוות התחזוקה.
אם כי להתקנים פיאזו-חשמליים יש בסיס משתמש בוגר, מדי-תאוצה MEMS מציעים שילוב קל ועלות מוקטנת לקבוצה מתפתחת של משתמשים חדשים. בנוסף, השילוב התפעולי המתקדם שלהם מאפשר להתקנים כגון חיישן הרעידות הדיגיטלי של MEMS ADIS16229 בעל המקמ”ש RF המשובץ לספק פיתרון מלא הכולל עיבוד אותות ותקשורת. סוג זה של התקן מיתכנת יכול לעורר את עצמו תקופתית, לבצע fast Fourier transform () על רישום הנתונים, להפעיל ניתוח ספקטראלי המעוצב לפי המשתמש על תוצאת ה-FFT, להציע תוצאות עובר/נכשל פשוטות באמצעות שידור אלחוטי יעיל, לספק גישה לנתונים ולתוצאות, ולחזור לאחר מכן לתרדמת. מאמצים חדשים של חישת רעידות מוצאים שחשיפה מהירה ועלות סבירה של רכישה הן סיבות טובות להעריך התקני MEMS משולבים במלואם.
יישומי ניטור הרעידות
כאשר משתמשים ברעידות כדי לקבוע את מצבה התקין של המכונה, המטרה היא לקשר רעידות בולטות עם מנגנוני שחיקה אופייניים, כגון מסבים, תיבות הילוכים, שרשראות, רצועות, מברשות, צירים ושסתומים. במכונה אופיינית, לפחות אחד ממנגנונים אלה דורש תחזוקה סדירה. איור 1 מראה שלוש דוגמאות של הקשר רעידה כנגד זמן עבור מנגנון שחיקה רגיל. אם כי דרוש זמן וניסיון כדי לפתח סוג זה של יחסים, חתימת רעידות מקושרת-היטב עשויה להיות חלופה חוסכת-עלות לתחזוקה סדירה הבאה אחרי זמני-מחזור קצרים. שימוש בהסתכלויות ממשיות, כגון רעידות, מספק הזדמנות לנקוט בפעולה מהירה כאשר מתגלים תנאי אזהרה (העקום האדום), בשעה שמונעים תחזוקה מוקדמת מידי על מכונות בעלות אורך-חיים גדול יותר (עקומות כחולה וירוקה).
איור 1 גם מראה שני ספי אזעקה (אזהרה, קריטית) ושלושה שלבים של מחזור תחזוקת המכונה (מוקדם, אמצעי, סופי). רמת האזהרה מגדירה את הרעידה המרבית במשך פעולה רגילה, כאשר הרעידה הנרשמת איננה מכילה סימנים של סיכון פוטנציאלי עבור המכונה או צוות ההפעלה. כאשר הם נמצאים בתחום הרגיל, מכשירים אחדים יכולים לשאת מדידות רעידה לא-תדירות. הרמה הקריטית מראה שהנושא נמצא בסיכון של נזק חמור, ויוצר תנאים בלתי-בטוחים עבור צוות התמיכה או הסביבה. ברור, מפעילי מכונות רוצים למנוע פעולה ברמה כזו, ולרוב הם מנתקים את המכונה. כאשר הרעידה נמצאת מעל רמת האזהרה, אך מתחת לרמה הקריטית, המכונה יכולה עדיין לבצע את המטלות שלה, אך יש לבחון אותה לעתים קרובות יותר והיא עשויה לדרוש תחזוקה נוספת.
לעתים, שלושת אזורי הפעולה הללו (רגיל, אזהרה, קריטי) ניתנים לקישור עם שלושת שלבי מחזור התחזוקה של המכונה: בשלב מוקדם, באמצע החיים, ובסוף החיים, ובמקרה זה הם יכולים להשפיע של אסטרטגיית ניטור הרעידות. לדוגמה, במהלך החיים המוקדמים, מכשיר עשוי לדרוש רק בחינה יומית, שבועית או חודשית של תכונות הרעידות הקריטיות. כאשר הוא נע לאמצע-החיים, הדבר עשוי להשתנות לבחינה מידי שעה, וכאשר המכונה מתקרבת לסוף-חייה, ניטור הרעידות עשוי להופיע עוד יותר תדיר, במיוחד במקרים בהם מפעילים או נכסים נמצאים בסיכון. בשלב זה, מכונות המנטרות רעידות תוך שימוש בציוד נייד יצברו עלויות חוזרות העשויות להיות לא-מעשיות בהשוואה לעלות התחזוקה. בעוד נכסים עיקריים יכולים להצדיק תשומת-לב מיוחדת, מכשירים אחרים רבים אינם יכולים לשאת את העלות החוזרת. כדי להשלים מדידות ידניות, חיישנים מבוססי-MEMS משובצים מספקים גישה יותר יעילה-לעלות עבור ציוד הדורש נתוני רעידות בזמן-אמת.
אופי הרעידות
רעידה היא תנועה מכנית חוזרת על עצמה. מספר תכונות חשובות לשם פיתוח מכשיר החש ברעידות. ראשית, לתנועה מתנודדת יש לעתים קרובות רכיבים הן ליניאריים והן סיבוביים. רוב הקשרים החשים ברעידות נוטים להתמקד בגודל התנודה, ולא בעקיבה המוחלטת אחרי המצב, כך שחיישנים ליניאריים כגון מדי-תאוצה MEMS מספיקים כדי ללכוד מידע על התנועה. כאשר התנועה היא בעיקר ליניארית, הבנת הכיוון עשויה להיות חשובה, בעיקר כאשר משתמשים בחיישנים חד-ציריים. במהופך, חיישן תלת-צירי יכול להציע יותר גמישות בהתקנה, מאחר שהכיוון האורתוגונאלי מאפשר קליטה של ציר אחד או יותר ללא תלות בכיוון הרעידה.
מאחר שהרעידה היא מחזורית, ניתוח ספקטראלי מציע דרך נוחה לאפיון פרופיל הרעידה (הקשר בין גודל הרעידה והתדר). לפרופיל המוצג באיור 2 יש הן רכיבים רחבי-פס והן צרי-פס, עם רעידה ראשונית ב-1350Hz, ארבע הרמוניות, ותוכן מסוים רחב-פס ברמה נמוכה. לכל מרכיב של ציוד תנועה יהיה פרופיל רעידה משלו, כאשר ההיענות צרת-הפס מציגה לעתים קרובות את התדרים הטבעיים של הציוד.
עיבוד אות
בחירת החיישן וארכיטקטורת עיבוד-האות תלויות במטרות היישום. לשם דוגמה, שרשרת האותות המוצגת באיור 3 מנטרת ברציפות תחום תדרים מסוים, ומספקת אזהרה ותאורה קריטית על לוח בקרה סמוך. המבט הפנימי של היצרן לתוך התכנון המכני מסתייע עם תכנון מסנן מעביר-הפס, במיוחד עם תדר ההתחלה, תדר הסיום וקצבי ה-roll-off של תחום המעבר. מהירות הסיבוב, התדרים הטבעיים של המבנה המכני והתנהגויות רעידה מיוחדות-לשגיאה יכולים כולם להשפיע על המסנן מעביר-הפס. בעוד סוג זה של גישה הוא פשוט, דרישות ניטור הרעידות יכולות להשתנות בשעה שנתוני העבר של מכונה מסוימת הופכים לזמינים. שינויים בדרישות הניטור יכולים להוביל לשינויים במבנה המסנן, העשויים להוות עלות הנדסית חוזרת. המפתחים יכולים להמיר מורכבות בגמישות על-ידי הפיכת תגובת החיישן הדיגיטלית, מימוש תפקידי מפתח של עיבוד אותות כגון מסנן, חישוב ה-rms ומגלי רמה, ומינוף מוצאי I/O משניים לתאורת תצוגת הבקרה או הפקה של מוצא מספרי.
איור 4 מראה שרשרת אותות עבור ה-ADIS16228, המשתמש בחיישן רעידות תלת-צירי דיגיטלי עם ניתוח FFT ואכסון לשם ניטור התוכן הספקטראלי של רעידות הציוד.
חיישן הליבה
חיישן הליבה עבור שתי הגישות יכול להיות מד-תאוצה MEMS. התכונות החשובות ביותר לשם בחירה של חיישן ליבה יהיו מספר הצירים, דרישות הזיווד/התקנה, ממשק חשמלי (אנלוגי/דיגיטלי), היענות לתדר (רוחב-פס) תחום מדידה, רעש וליניאריות. בעוד מדי-תאוצה תלת-ציריים MEMS רבים תומכים בחיבור ישיר עם רוב המעבדים המשובצים, לכידת הרמה הטובה ביותר הזמינה של ביצועים עשויה לדרוש פתרונות בעלי ציר-יחיד או כפול בעלי מוצאים אנלוגיים. לדוגמה, מד-התאוצה ®iMEMS רחב-פס בעל הביצועים הגבוהים ADXL001 ממנף את התהודה שלו של 22 קילו-הרץ כדי לספק את אחד מרוחבי-הפס הרחבים ביותר הזמינים, אך הוא זמין רק כהתקן של ציר-יחיד, בעל מוצא אנלוגי. מוצאים אנלוגיים יכולים לאפשר ממשק מהיר במערכות בעלות ערוץ אנלוגי-לדיגיטלי זמין, אולם המגמה הנוכחית של הפיתוח נוטה להעדיף את החיישנים בעלי ממשקים דיגיטליים.
ההיענות לתדר של חיישן הליבה ותחום המדידה קובעים את תדר ואמפליטודת הרעידה המרבי שהוא יכול לעמוד בו לפני רוויית המוצא. הרווייה פוגעת בהיענות הספקטראלית, ויוצרת תוכן אקראי שעשוי לגרום לאזעקות-שווא, אף כאשר תדר הרווייה איננו פוגע בתדר הראשי. התחום ותדר המדידה קשורים על-ידי:
Ap-p=Dp-p x ω2
כאשר D הוא התזוזה הפיזיקלית, ω הוא תדר הרעידה ו-A הוא התאוצה.
בעוד ההיענות לתדר ותחום המדידה קובעים גבולות עליונים להיענות החיישן, הרעש והליניאריות שלו מגבילים את הרזולוציה שלו. הרעש יקבע את הגבול התחתון של הרעידה אשר יגרום לתגובה במוצא, בעוד הליניאריות תקבע כמה תוכן הרמוני מזויף מופק על-ידי אות הרעידה.
מסנן אנלוגי
המסנן האנלוגי מגביל את תוכן האות לאזור Nyquist אחד, המציג מחצית קצב הדגימה במערכת המודגמת. אף כאשר תדר הקיטעון של המסנן הוא בתוך אזור Nyquist, לא ניתן להשיג דחייה של רכיבי תדר גבוה יותר שיכולים עדיין להיכלל בתוך פס המעבר. לגבי מערכת המנטרת רק את אזור Nyquist הראשון, התנהגות הכללה זו יכולה ליצור כשלים מלאכותיים ולעוות את מראה תוכן הרעידה בתדר מסוים.
הצגת חלונות (windowing)
דגימה קוהרנטית-בזמן איננה מעשית לעתים קרובות ביישומי חישת-רעידות, מאחר שערכי הדגימה הלא-מאופסים בתחילה ובסוף של פרק הזמן יוצרים זליגה ספקטראלית גדולה, העשויה להפחית את רזולוציית ה-FFT. הפעלת פונקציית חלון לפני חישוב ה-FFT עשויה לסייע בניהול הזליגה הספקטראלית. פונקציית החלון הטובה ביותר תלויה באות המעשי אך ככלל, הפשרות כוללות איבוד העיבוד, זליגה ספקטראלית, איתור אונות ורמות האונות.
Fast Fourier Transform ()
ה-FFT הוא אלגוריתם יעיל כדי לנתח נתוני זמן דיסקרטיים. התהליך הופך את רישום הזמן לרישום ספקטראלי דיסקרטי, כאשר כל דגימה מייצגת קטע תדר דיסקרטי של אזור ה-Nyquist. המספר הכולל של דגימות מוצא שווה למספר הדגימות ברישום הזמן המקורי, המציג ברוב המקרים מספר בסדרה הבינומיאלית (1, 2, 4, 8…). לנתוני הספקטרום יש מידע הן על הגודל והן על המופע, שניתן להציג בצורה מלבנית או קוטבית. במקרה של צורה מלבנית, מחצית התיבות של ה-FFT כוללת מידע על הגודל כאשר המחצית השנייה כוללת מידע על המופע. במקרה של צורה קוטבית, מחצית של תיבות ה-FFT מכילה את התוצאה הממשית, בעוד המחצית השנייה מכילה את התוצאה המדומה.
במקרים מסוימים, הן מידע על הגודל והן על המופע הם שימושיים, אולם היחס גודל/מופע מכיל לעתים קרובות מידע מספיק כדי לגלות שינויים עיקריים. לגבי התקנים המציעים רק תוצאות של גודל, מספר התיבות של ה-FFT שווה למחצית הדגימות ברישום המקורי במישור הזמן. רוחב תיבת ה-FFT שווה לקצב הדגימה מחולק במספר הכולל של רישומים. במידת-מה, כל תיבת FFT היא כמו מסנן מעביר-פס יחיד במישור הזמן. איור 5 מספק דוגמה של חיישן רעידות MEMS, הדוגם בקצב של 20480 דגימות בשנייה (SPS) ומתחיל ברישומים של 512 נקודות. במקרה זה, החיישן רק מספק מידע על הגודל, כך שהמספר הכולל של תיבות הוא 256 ורוחב התיבה שווה ל-40 הרץ (20480/512).
רוחב התיבה חשוב מאחר שהוא קובע את רזולוציית התדר כאשר התדר עובר מתיבה אחת לסמוכה לה, ובגלל שהוא קובע את הרעש הכולל שהתיבה תכיל. הרעש הכולל (rms) שווה למכפלת צפיפות הרעש
והשורש הריבועי של רוחב התיבה , או . עבור יישומים בתדר נמוך, כאשר הרעש נוטה להשפעה הגדולה ביותר על הפרדת הרעידה, מסנן דסימציה (decimation) לפני מעבד ה-FFT יכול לסייע בשיפור הרזולוציה של התדר והגודל מבלי לדרוש שינוי בתדר הדגימה של ה-ADC. הפחתת קצב הדגימה של 20480 SPS בגורם של 256 משפרת את רזולוציית התדר בגורם של 256 תוך צמצום הרעש בגורם של 16.
אזעקות ספקטראליות
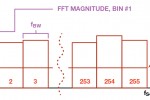
אחד מיתרונות-המפתח בשימוש ב-FFT הוא שהוא מאפשר מימוש פשוט של אזעקות ספקטראליות. איור 6 מציג דוגמה הכוללת חמש אזעקות ספקטראליות עצמאיות המנטרות את התדר הטבעי במכונה (#1), בהרמוניות שלו (#2, #3 ו-#4) ואת התוכן בפס רחב (#5). רמות האזהרה הקריטית מתאימות לרמות ברעידת מצב הבריאות של המכונה כנגד פרופיל הזמן. תדרי ההתחלה והסיום משלימים את הגדרת משתני התהליך המוצגת על-ידי קישור זה. כאשר משתמשים במעבד משובץ, משתני ההגדרה של אזעקה ספקטראלית (תדרי תחילה וסיום, רמות אזעקת אזהרה/קריטית) יכולים להימצא באתרי אוגר הניתן לעיצוב המשתמשים בקודים דיגיטליים לשם עיצוב. שימוש באותם גורמי סקאלה וסכימת מספור התיבות עשוי לפשט בהרבה תהליך זה.
ניהול הרישום
אחת הפונקציות העיקריות הכרוכה ביחסי משתני התהליך היא ניהול הרישום. אכסון של רישומי FFT משלבים שונים של זמן-החיים של כל מכונה מאפשר ניתוח של מגוון התנהגויות העשויות להוביל לעקומת שחיקה התורמת לתכנון התחזוקה והאבטחה. בנוסף לאיסוף של נתוני רעידות בעבר, משתמשים אחדים יעריכו את לכידת נתוני תנאים הכרוכים עם פרמטרים כגון ספק הכוח, טמפרטורה, תאריך, זמן, קצב דגימה וסינון.
ממשק
הממשק תלוי בתשתית הקיימת במתקן מסוים. במקרים מסוימים, תקני תקשורת מוכנים-לכבלים תעשייתיים כגון ה-Ethernet או RS-485 זמינים בנקל, כך שהממשק בין חיישן חכם ומערכת התקשורת עשוי להיות תהליך משובץ. במקרים אחרים, אותו התהליך המשובץ יכול לשמש לממשק את החיישן החכם עם פרוטוקול אלחוטי קיים, כגון Wi-Fi, ZigBee או תקן מיוחד למערכת. חיישנים חכמים אחדים, דוגמת צומת השערים האלחוטי עבור חיישני מרוחקים ADIS16000 וה-ADIS16229 מסופקים עם ממשק אלחוטי מוכן-לפריסה הזמין דרך ממשקים משובצים רגילים כגון ה-SPI או ה-I2C.
סיכום
טכנולוגיית MEMS אינרטית מובילה לעידן חדש של ניטור רעידות ומאפשרת בסיס משתמש רחב יותר עבור סוג זה של מכשור. ביצועים, זיווד והכרה מקרוב עשויים לתרום לשימוש המתמשך בטכנולוגיה פיאזו-חשמלית, אך ניטור הרעידות גדל ומתפתח. באמצעות שילוב תפקודי וקלות האימוץ, התקני MEMS זוכים לתשומת-לב גוברת ביישומים חדשים של ניטור רעידות. הנוחות, באמצעות עיבוד אותות מתקדם בנקודת החישה, מקטינה את עומס הניטור למצב פשוט (רגיל, אזהרה, קריטי) עבור רוב המצבים. בנוסף, גישה לנתונים מרוחקים דרך ערוצי תקשורת נוחים יוצרת יישומים חדשים עבור מכשירי ניטור הרעידות. התפתחויות עתידיות במדידות של ביצועי מפתח (רעש, רוחב-פס ותחום דינמי) והרמה גבוהה של שילוב פונקציונלי יסייעו לנטייה זו להוסיף להתקיים בעתיד הקרוב.
סימוכין
Circuit Note CN0303. MEMS-Based Vibration Analyzer with Frequency Response Compensation. Scannell, Bob. MS-2507. Enabling Continuous and Reliable Process Monitoring with Wireless Vibration Sensors.
המחבר הינו מהנדס יישומי ®iSensorב-Analog Devices ב-Greensboro North Carolina. מאז הצטרפותו ל-ADI ב-1998, הוא צבר ניסיון בעיבוד חיישנים-אותות, ממירים אנלוגיים לדיגיטליים מהירים, והמרת הספק dc-to-dc. הוא קיבל תואר (1994) ו- (1995) בהנדסת חשמל מאוניברסיטת Nevada, Reno ופרסם מספר מאמרים. לפני הצטרפותו ל-ADI, הוא סייע בהשקת IMATS, חברת אלקטרוניקה ופתרונות-תעבורה, ועבד כמהנדס תכנון ב-Interpoint Corporation.
-
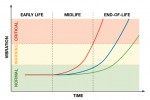
- איור 1. דוגמה של רעידות כנגד זמן
-
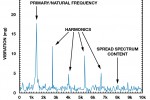
- איור 2. פרופיל רעידה לדוגמה, תדר טבעי 1350Hz~.
-
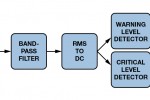
- איור 3. דוגמה של שרשרת אותות רעידה במישור הזמן
-

- איור 4. שרשרת האותות של ה-ADIS16228 לשם ניתוח רעידות ספקטראלי
-
- איור 5. מוצא של ADIS16228
-

- איור 6. FFT לדוגמה עם אזעקות ספקטראליות
-

- Mark Looney מהנדס יישומי ®iSensorב-Analog Devices ב-Greensboro North Carolina
