















מדריך זה מקיף את העקרונות הבסיסיים של מנועי צעד ושל מערכות בקרה למנועי צעד, לרבות העקרונות הפיסיקליים של מנועי הצעד, האלקטרוניקה של מערכות הבקרה הבסיסיות וארכיטקטורת התוכנה המתאימה לבקרת המנועים.
הקדמה
אל מנועי צעד אפשר להתייחס כאל מנועים חשמליים ללא מחלפים (commutator). בדרך כלל, כל הליפופים במנוע הם חלק מהסטטור, והרוטור עשוי ממגנט קבוע או, במקרה של מנועי (Variable Reluctance motor), מבלוק של חומר מגנטי רך עם בליטות. בקרת המנוע והשליטה נעשים ע”י בקר חיצוני, ובדרך כלל המנועים והבקרים מתוכננים כך שרוטור יכול להימצא בכל זווית, וכן שאפשר לסובב אותו בשני הכיוונים. את רוב מנועי הצעד אפשר לסובב בצעדים בתדירויות השמע, עובדה שמאפשרת להם להסתובב במהירות גבוהה, ובעזרת בקר מתאים אפשר להפעיל אותם ולעצור אותם באופן הדוק ביותר ובכיוונים מבוקרים.
מנועי צעד משמשים בעיקר ליישומי מיקום, אבל אין הם היחידים שיכולים למלא משימה זו. במאמר זה נבחן את כל האפשרויות שעומדות בפניך.
פרטים לגבי מבחר מנועים כאלו המשמשים עבור יישומים של מנועי מיקום, מופיעים בהמשך. שים לב שקיימות טופולוגיות נוספות אפשריות, לדוגמה מנועי השראת זרם חילופין או מנועי פייזו Piezo, אבל שלושת המנועים המפורטים בהמשך, מייצגים את הרוב המכריע של יישומים המשמשים כיום בבקרת תנועה רב תכליתית.
מנועי צעד Stepper Motors
מנועים אלו מציבים את עצמם במקום, ולכן פשוט להשתמש בהם. לא נדרש להם מקודד כדי שמקומם יישמר, וגם לא נדרש להם חוג בקרת סרוו. החסרונות העיקריים שלהם באים לידי ביטוי ברעידות וברעש ובטווח מהירויות מוגבל. בדומה למנועי זרם ישר חסרי מברשות BLDC, במנועי צעד יש צורך לבצע בקרה חיצונית באמצעות הינע תלת מופעי.
מנועי מברשות לזרם ישר DC Brush
למנועים אלו נדרש מקודד מיקום עבור המשוב והם מיוצבים באמצעות בקר PID (יחס, אינטגרל ונגזרות) או באמצעות בקר חוג מיקום אחר. למנועים מברשות לזרם ישר לא נדרש מקור חיצוני ליצירת המופע – עצם דחיפת הזרם אליהם, כבר מניע אותם. עם זאת, המברשות המכניות שבתוך המנוע, היוצרות את המגע עם המחלף, עלולות להתבלות במשך הזמן ולהפסיק לפעול.
מנועי זרם ישר ללא מברשות (Brushless DC Motor)
למנועים אלו נדרשת בקרת סרוו עם מקודד ומשוב וכן, בקרה אלקטרונית מבחוץ. בהשוואה למנוע מברשות לזרם ישר, מנועי זרם ישר ללא מברשות מציעים היום את אפשרות הבחירה המועדפת ביישומי בקרת סרוו, מפני שהעלויות שלהם, אשר פעם היו גבוהות יותר, פחתו מאוד.
עבור חלק מהיישומים, אפשר לבחור בין שימוש במנועי סרוו לבין שימוש במנועי צעד. שני סוגי מנועים אלו מציעים אפשרויות דומות למיקום מדויק, אבל יש ביניהם הבדל בכמה פרמטרים. למנועי סרוו יש צורך במערכות בקרת משוב אנלוגי מסוג מסוים, אשר בו, בדרך כלל, משולבים פוטנציומטר שמספק משוב לגבי מיקום הרוטור וכן מעגל לדחיפת זרם דרך המנוע, ביחס הפוך להפרש שבין המיקום הרצוי למיקום הקיים.
בעת בחירה בין מנועי צעד לבין מנועי סרוו, יש לקחת בחשבון כמה נושאים, כאשר חשיבות כל אחד מהם בקבלת ההחלטה תלויה ביישום. לדוגמה, דיוק המיקום בשימוש במנוע צעד תלויה בגיאומטריה של רוטור המנוע, לעומת דיוק המיקום בשימוש במנוע סרוו תלויה ביציבות של הפוטנציומטר ושל רכיבים אנלוגיים אחרים במעגל המשוב.
אפשר להשתמש במנועי צעד במערכות בקרה פשוטות בחוג פתוח. מערכות אלו מתאימות בדרך כלל לשימוש בתאוצות נמוכות עם עומס קבוע, אם כי ייתכן שבקרה בחוג סגור תהיה חיונית לצורך הפעלה בתאוצות גבוהות, בייחוד אם כרוכים בהם עומסים משתנים. אם מנוע צעד יהיה נתון למומנט יתר ביישום מערכת של בקרה בחוג פתוח, כל המידע לגבי מיקום הרוטור יאבד, ויהיה צורך לאתחל את המערכת במנועי סרוו, בעיה זו כלל לא קיימת.
הסוגים השונים של מנועי צעד
קיימים שני סוגים של מנועי צעד, מנועי מגנט קבוע ומנועי VR, (קיימים גם מנועים היברידיים, אשר בינם לבין מנועי מגנט קבוע אין הבדל מנקודת המבט של הבקר). כאשר אין תווית על המנוע, אפשר בדרך כלל להבדיל בין שני הסוגים דרך תחושה, כאשר אין הם מחוברים למתח. מנועי מגנט קבוע נוטים “להיתקע” בזמן שמסובבים את הרוטור באצבע, לעומת מנועי VR, שיסתובבו באופן חופשי כמעט (על אף שהם עלולים להיתקע קצת כתוצאה ממגנטיות שיורית שנותרה ברוטור).
אפשר גם להבדיל בין שני הסוגים עם אוהם-מטר. למנועי VR יש בדרך כלל שלושה סלילים (לפעמים ארבעה), עם חיבור משותף, בעוד שלמנועי מגנט קבוע יש שני סלילים עצמאיים, עם סנף אמצעי או בלעדיו. סלילים עם סנף אמצעי משמשים במנועי מגנט קבוע חד קוטביים.
מנועי צעד קיימים בטווח רחב של רזולוציות זוויתיות. המנועים בעלי הרזולוציה הגסה ביותר מסתובבים בדרך כלל ב-90 מעלות בכל צעד, לעומת מנועי מגנט קבוע בעלי רזולוציה גבוהה שיכולים להגיע ל-1.8 או אפילו ב-0.72 מעלות, בכל צעד. בעזרת בקר מתאים אפשר להפעיל את רוב מנועי המגנט הקבוע והמנועים ההיברידיים בחצאי צעד, ובקרים מסוימים יכולים לטפל בצעדים חלקיים קטנים יותר ואפילו בצעדי מיקרו.
במנועי מגנט קבוע וגם במנועי צעד, חיבור מתח לסליל אחד בלבד יגרום לרוטור (אם לא יהיה נתון בעומס) לנוע אל זווית קבועה ולהישאר בזווית זו עד אשר המומנט שיופעל עליו יהיה גדול ממומנט ההחזקה של המנוע. במצב זה, המנוע ינוע וינסה להישאר בכל נקודת שיווי משקל עוקבת למקום האמור.
מנועי Variable Reluctance VR – סוג זה של מנועים לא משתמש במגנט קבוע. כתוצאה מכך, הרוטור יכול לנוע ללא מגבלה . סוג זה של מבנה נפוץ פחות, ומשמש בדרך כלל ביישומים שלא נדרש להם מומנט גבוה.
מנועי מגנט קבוע – במנועים אלו, שנקראים גם מנועי “קופסת פח” (tincan) או מנועי canstack, הרוטור משמש כמגנט קבוע. הם פועלים במהירות נמוכה יחסית ובמומנט נמוך באופן יחסי, עם זוויות צעד גדולות של 45 מעלות או 90 מעלות. המבנה הפשוט שלהם מאפשר לייצר את המנועים בעלות נמוכה יחסית, ולכן הם מהווים את הבחירה המתאימה ביותר ליישומי הספק נמוך.
מנועי צעד היברידיים – גרסה זו של מנועי צעד היא שילוב חכם בין מנועי VR ומנועי מגנט קבוע.
היסודות של מנועי צעד
התכונות של מנועי צעד
זווית הסיבוב הינה יחסית למספר אותות הדופק בכניסה
מהירות הסיבוב הינה יחסית לתדירות אותות הדופק בכניסה
נדרשת מערכת שליטה בחוג פתוח ללא משוב מיקום
תגובה מצוינת לפקודות האצה, האטה וצעד
שגיאת המיקום אינה מצטברת ( של זווית הצעד)
אופיינים מצוינים של מהירות נמוכה ומומנט גבוה ללא צורך בהפחתת התמסורת
מומנט החזקה נוצר עם חיבור מתח
בעלי מומנט עצירה מכני מובנה
יכולת פעולה דו כיוונית
אפשר לגרום להם לתקיעה (stall) בלי לגרום נזק למנוע
אין בהם מברשות ולכן בעלי אורך חיי פעולה ארוך ללא תקלות
מסבים כדוריים מדויקים (בתלות במותג ובסוג)
חסרונות מנועי הצעד
עלולים להופיע מצבי תהודה אם הבקרה לא מבוצעת כראוי
קשה לתפעל אותם במהירויות גבוהות מאוד
אם הם מופעלים במומנט יתר, כל המידע לגבי המיקום נעלם ויש לאתחל את המערכת
המנועים מפיקים פחות מומנט בהשוואה למנועי מתח ישר או מתח חילופין שווי ערך בגודל נתון
חיבורי הסלילים
מנועי צעד מיוצרים במספר תצורות מוליכים. המקובלות ביותר:
4 מוליכים – דו קוטבי
5 מוליכים – חד קוטבי
6 מוליכים – חד קוטבי, דו קוטבי (בחיבור טורי)
8 מוליכים – חד קוטבי, דו קוטבי (בחיבור טורי), ודו קוטבי (בחיבור מקבילי)
מצבי פעולת הצעד
את מנועי הצעד אפשר לדחוף בכמה רצפים שונים. הנפוצים ביותר הם:
הינע גל
במצב זה רק סליל מופע אחד מחובר למתח ברגע נתון. המשמעות עבור מנוע חד קוטבי היא שימוש ב-25% בלבד מהסלילים הקיימים או במנועים דו קוטביים שימוש ב-50% בלבד מהסלילים הקיימים.
הינע צעד מלא
במצב זה שני סלילי מופע מחוברים למתח בכל רגע נתון. המשמעות עבור מנוע חד קוטבי היא שימוש ב-55% מהסלילים הקיימים או במנועים דו קוטביים שימוש ב-100% מהסלילים.
הינע חצי צעד
במצב זה יש שימוש לסירוגין ברצפים של הינע גל והינע צעד מלא על מנת לאפשר לרוטור להתיישר בחצאי הצעד. המשמעות עבור מנועים חד קוטביים היא שימוש ב-37.5% מהסלילים הקיימים (בממוצע) או במנועים דו קוטביים שימוש ב-75% מהסלילים.
יישומים
מכונות תעשייתיות
מנועי צעד משמשים בשעוני רכב וציוד ייצור עיבוד שבבי אוטומטי. רובוטים במערכות ייצור.
אבטחה
מוצרי מעקב חדשים לתעשייה הביטחונית. כולל מצלמות האבטחה PAN / ZOOM / TILT
רפואי
מנועי צעד נמצאים בתוך סורקים, דוגמים רפואיים, במערכות צילום שיניים דיגיטלי, משאבות נוזלים ומכונות בדיקת דם.
מוצרי צריכה
מנועי צעד משמשים במצלמות לפונקציות מיקוד מצלמה וזום דיגיטליים אוטומטיות, במדפסות.
פתרונות מנועי צעד של חברת ON Semiconductor
עם עלייה בשימוש במוצרי אבטחה, יישומים רפואיים ותעשייתיים, כמו גם ירידה בעלויות ייצור והרכבה של מערכות הינע, יצרנים נדרשים לרמת אינטגרציה גבוהה יותר וכן להוזלת מחירים. בעולם הדיגיטלי כל 18 חודשים בממוצע רוחב הסרט גדל פי 2 וגודל הרכיבים מצטמק ב-50%.
לעומת זאת בעולם ההספק האנלוגי אשר אליו משתייכים המנועים החשמליים השיפורים מסובכים יותר עקב הדרישה לרמות הספק גבוהות מהמנועים וגם הצורך בשטח גדול לצורך פיזור הספקי החום וכן זרמים גבוהים. ובכל זאת הבקרים נדרשים להיות נצילים יותר קטנים יותר ורמה גבוהה יותר של אינטגרציה.
עם דגש על המחיר, רמת דיוק ופשטות השימוש, הפופולריות של מנועי צעד עלתה כפי שצוין.
באופן תיאורטי מנועי צעד מדהימים בפשטותם, הם ללא מברשות או מגעים. ניתן לומר שאלו מנועים סינכרונים אשר ממתגים את הזרם אשר גורם לשינוי השדה המגנטי ע”מ לסובב את הרוטור. או במילים אחרות ממירים פולסים דיגיטלים לגל סיבוב מכני, בקיצור מנוע דיגיטלי.
בקרת הזרם במנועי צעד
בקרת הזרם ב-2 סלילי המנוע באמצעות גשר מלא () – Voltage mode
דרייבר למנועי צעד מושפע ממספר פרמטרים עיקריים:
מומנט
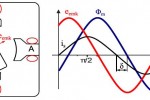
מומנט הינו כוח הפועל בניצב לרדיוס הסיבוב וגורם לרוטור להסתובב או לעצור. ע”מ ליצר מומנט שני אלמנטים נדרשים: כח מגנטי ברוטור הנוצר מנוכחות מגנט קבוע, כח מגנטי בסטאטור הנוצר ע”י הזרמת זרם בסלילי הסטאטור. הכח יהיה מקסימאלי ששני הכוחות יפעלו בכיוונים מנוגדים
. המומנט גדל ככול שהזרם בסטאטור גדל ויגיע לערך מקסימלי שעוצמת הזרם וכיוון השדה המגנטי יהיו מקסימליים. המומנט המקסימלי מועבר בקצה האיזור היציב. אם המומנט יופעל באיזור אחר, הדבר יכול להביא לעצירת המנוע והיתקעותו.
זווית העומס
זווית העומס הינה הזווית בין השדה ברוטור לשדה בסטאטור. קיימת נק’ שיווי משקל בין המומנט במנוע לבין העומס. בהגדלת העומס זווית העומס גדלה אף היא.
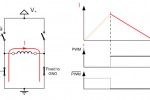
בקרת זרם
בשימוש במודולצית פולסים PWM במיתוג בגשר מלא H, ייווצר מפל מתח בין ההדקים של סלילי המנוע, מפל המתח יגרום להזרמת זרם מתגבר בסליל עפ”י השראות הסליל. כשהסליל מקוצר (Short) הזרם הזרם בסליל דועך.
הנקודות הקריטיות עבור מנועי צעד ויישומיהם.
מצלמות אבטחה
כשהביטחון הופך לדאגה העיקרית היום בעולם, השימוש במצלמות אבטחה הוכפל פי ארבע בחמש השנים האחרונות. כשמצלמות האבטחה הדיגטליות נעמדות בחוד החנית של הטכנולוגיה, אנו נחשפים לשימוש גובר בחיישני תמונה זולים מסוג CMOS ו-CCD ברזולוציות גבוהות. איכות הווידאו המופק תלוי בצורה ישירה בחיישנים אלו ותנועה עקב הזזת המצלמה גורמת למריחת התמונה ואיבוד רזולוציה. בעולם נימצאו כבר פתרונות עבור מנועים המצמצמים את התופעה של מריחת התמונה עקב סיבוב המצלמה, חלק מהפתרונות מבוסס על טכניקה יקרה הבנויה על מנועי סרבו ברזולוציה גבוהה מבוססי Shaft encoder quality. השימוש בטכנולוגיה זו יוצר עלויות מערכת גבוהות לכן נדרשת גישה שונה.
חברת ON Semiconductor מציגה את LV8714A שהוא למעשה פתרון ברמת אינטגרציה מאד גבוהה של דריבר דואלי בעל PWM קבוע מבוקר זרם.
הבקר כולל בתוכו 4 גשרים מלאים מסוג H Bridge כולל דרייברים. LV8714A יכול לדחוף עד 2 מנועי צעד או 4 מנועי Brushed Motors. רכיב זה מאפשר פתרון מלא למצלמות אבטחה הכוללת Pan/Tilt תוך פרק זמן מאד מצומצם. פתרון זה גם מאפשר עבודה במקביל של שני הצירים ע”י כניסת משוב נפרדת לכל ערוץ. מתח כניסה רחב של 4V -16.5V כלומר תומך בכל ספק מתח סטנדרטי בשוק של 5V, 12V, 15V מאפשר הזנה ע”י PoE. בנוסף תומך באפשרויות הבאות:
1. אספקת מתח ממקור יחיד עבור שני הערוצים.
2. צריכת זרם עצמית נמוכה ונצילות גבוהה עקב שימוש ב-Low RdsON FETs.
3. חיישני זרם פנימיים לצימצום מספר הרכיבים הפריפראלים. ביחד עם המתגים הפנימיים מאפשר שיפור בנצילות של 35% ביחס למתחרים.
4. הגנות זרם יתר, מתח נמוך וכן הגנות תרמיות ללא שימוש ברכיבים חיצוניים מאפשרות תכנון עמיד יותר של המוצר הסופי.
5. יכולות מיקרו צעד (MicroStep) ע”מ לאפשר עבודה במוד “Pseudo-Servo”. זהו הרכיב הראשון בשוק עם יכולות כאלו.
6 . באמצעות יכולות מיקרו צעד ליניאריות אלו ניתן להגיע לכל רזולוצית סיבובי מנוע אפשרית ובכך לאפשר תנועה חלקה מסביב לצירים בו זמנית עבור שני הצירים.
7. צריכת הספק חשמלי בזמן המתנה (StandBy) נמוכה ביותר, פחות מ-1uA. דבר המאפשר חסכון אנרגטי עצום.
יישומים תעשיתיים עבור מנועי צעד
פרמצבטיקה
חברות תרופות מסתמכות על בקרות אוטומטיות לעיבוד ואריזה של תכשירים פרמצבטים להפצה שלאחר הייצור. בקווים אוטומטים אלו עושים שימוש בכל דבר החל מאריזת שלפוחית, מיכלי פלסטיק המעוצבים בעזרת אויר, אמפולות ובקבוקונים, מכסים וסוגרים, שפופרות, עזרים שונים וזכוכית. לשיטות העיבוד ומיכלי האריזה שהתעשיה הפרמצבטית עושה בהם שימוש, לכולם חוט מקשר אחד – בקרת מנועי צעד. במנועי צעד עושים שימוש בקווי תעשיה פרמצבטית בדרך כלל היכן שנעשים תהליכי מיון, הכוונה, מילוי, איטום או אריזה. הרבה מיישומי מנועי הצעד הפרמצבטים משלבים מספר גדול של צירים. בשימוש של LV8714A, דרייבר משולב של מנוע צעד מספק אלטרנטיבה יעילה וזולה לדרייברים נפרדים של מנועי צעד ומנועים. מלבד החיסכון בכסף, הלקוח מכיר ביעילות של דרייבר מנועי משולב שמקטין זמני הכנה ומפחית רמות מלאי של חלקי חילוף. דרייברים כמו LV8548MC ו-LV8729V מצטיינים בפשטות ולכן זמן מהיר לשוק.
יישומים מוליכים למחצה
תהליך הייצור של מוליכים למחצה מורכב ובדרך כלל מתבצע בכמויות גדולות. בקרות אוטומטיות משחקות תפקיד גדול בהצלחה או בכישלון של מפעלי ייצור פרוסות הסיליקון. בכל התהליך של ייצור מוליכים למחצה מבקרה רובוטית והרכבה כללית עד לפיקוח ומדידה נעשה שימוש במנועי צעד. בתעשיית כמויות גדולות כמו בתעשיה של מוליכים למחצה, בקרות עם ביצועים גבוהים הן הכוח המניע מאחורי ארגונים רווחיים. סדרת ה-Stepper Motor Driver של ON Semiconductor והתמיכה הטכנית/מעבדות ההינע של ON Semiconductor במרכזי הנדסה בכל העולם, מצמצמים את הריסק בגין ההתאמה של מנוע ודרייבר. סדרת ה-Stepper Drive של ON Semiconductor מייצגת שיטה אמינה ויעילה להבטחת ביצוע אופטימלי מכל מנוע צעד בקו. יותר מכך, קריאות מהשטח (recall) מופחתות בעוד נצילות המכונה היא מקסימלית. דרייברים כמו סדרת LV8731V עם מתח כניסה גבוה מותאם מאוד ליישומים תעשייתיים.
יישומי רכב/קו הרכבה
מרבית מתקני הרכבת הרכבים כיום כוללים קווי הרכבה אוטומטים בכדי לייצר כמויות גדולות של מכוניות ומשאיות ולהפחית טעויות אנוש היכולות להתרחש בהרכבה או ייצור ידני. כמו בייצור של כל קו הרכבה, מנוע ובקר מנהלים את התנועה של אלומיניום, ברזל, פלסטיק, גומי וזכוכית לאורך כל התהליך. ביישום אופיני, המנוע מספק את חומר הגלם או המוצר ההתחלתי לקו ההרכבה. מכיוון שהמערכת מתוכננת לצמצום הבזבוז והגברת היעילות, למהנדסים צריכה להיות בקרה ייחודית אך פשוטה על פעילות המנוע. ע”י אינטגרציה של FETs דרייברים ולוגיקה לתוך מארז קטן, הקונפיגורציה של הדרייברים של ON Semi היא קלה ומדויקת יותר. שלא כמו קונפיגורציה נפרדת למנוע צעד ובקר הדורשת כיול משותפת, הדרייבר של המנוע צעד המשולב של ON Semi מגיע “כמעט עם התאמה מושלמת” מהיחידה הטכנית.
Art Gonsky is a Solutions Engineering Manager in Global Technical Marketing at ON Semiconductor/SSG Division
-

- בקרת הזרם ב-2 סלילי המנוע באמצעות גשר מלא – Voltage mode
-
- זווית העומס
-
- בקרת זרם
-

- יישומים תעשיתיים עבור מנועי צעד
