














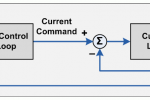
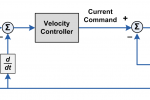
בקרי סרוו משתמשים בדרך כלל בתצורה טורית (cascaded) שבה חוג המהירות מקבל פקודה מחוג המיקום. תצורה זו התפתחה בזמן שבו יושמו בקרי הזרם והמהירות באמצעות חומרה ואילו בקרת המיקום הושגה באמצעות תוכנה, והיא עדיין נפוצה בשל הפשטות שלה. תחילה מכויל בקר המהירות ולאחר מכן מכויל בקר המיקום, בעוד הפרמטרים של בקרת הזרם נקבעים בדרך כלל באופן אוטומטי. בקר המיקום מורכב על פי רוב מהגבר פרופורציוני פשוט, בעוד שבקר המהירות כולל הגבר פרופורציוני ואיבר אינטגרל (איור 1).
אחד החסרונות של תצורה זו הוא קיומה של שגיאת עקיבה מובנית במהלך תנועה ביחס ישר למהירות. שיטות הזנה מראש (feed-forward) נוטות להקטין את השגיאה אך זאת על חשבון תגובת יתר (overshoot) או זמן התייצבות ארוך יותר.
כדי להתגבר על מגבלות אלו ולשפר את ביצועי הסרוו ביישומי הנע רבי דיוק פיתחה סרווטרוניקס אלגוריתם בקרה לא-לינארי מסתגל (adaptive). אלגוריתם קנייני זה, הנקרא HD Control , משתמש בתצורה מקבילה שבה כל הענפים נמצאים באותה הרמה ומבוצעים בכל פרק דגימה. בכל ענף מונהג פרמטר הגבר משתנה העובר אופטימיזציה באופן אוטומטי להגבר וליציבות גבוהים. כתוצאה מכך מצומצמים שגיאת המיקום וזמן ההתייצבות לרמות טובות בהרבה מהרמות המושגות באמצעות בקרים אחרים.
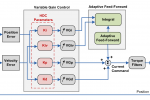
הרכיבים העיקריים של האלגוריתם הם מודול הגבר משתנה התורם לשגיאת תנועה קטנה ביותר ומודול הזנה מראש מסתגל המאפשר זמן התייצבות קצר מאד (איור 2).
בקרת הגבר משתנה (VG)
ההגברים המשתנים (VGd, VGp, VGiv, VGi) מחושבים באופן פנימי ומותאמים באופן דינמי במהלך פעולת אלגוריתם ה-HDC. כל הגבר הוא פונקציה מסוימת של מערכת המשתנים, כגון שגיאות מהירות ומיקום. במהלך תנועה כל אחד מההגברים המשתנים עשוי להגיע לערכים גבוהים עד פי עשר מאשר במצב נייח. בכך מתקבלת עקיבת-נתיב מדויקת ביותר במהלך התנועה לצד פעולה שקטה במהירות נמוכה ובמצב נייח. בנוסף, קשיחות המערכת גדלה פי שלוש ויותר במהלך התנועה ומובילה לשגיאת עקיבה קטנה ביותר.
ארבעת משתני ההגבר מאוזנים על ידי אלגוריתם קנייני השומר על יציבות המערכת. ענף הפרמטר Kd שקול לחוג משוב המהירות ומשמש לצמצום שגיאות מהירות. ענף הפרמטר Kp הוא חוג משוב מיקום יחסי לצמצום שגיאות מיקום. ענף הפרמטר Ki הוא אינטגרל של חוג משוב המיקום המשמש לצמצום שגיאות במצב נייח.
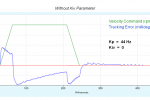
ענף הפרמטר Kiv ייחודי ל-HD Control והוא משלב את תוצאי הענפים Kp ו-Ki. הוא גורם לקשיחות כפולה מזו של Kp מבלי ליצור תנודות, הוא מקטין את שגיאת העקיבה הן במהלך ההאצה הן במצב נייח והוא מונע שגיאות מצב נייח בדומה למשוב אינטגרל (Ki) אך עם זמן התגובה המהיר של משוב יחסי (Kp) (איור 3).
יתרונות ה-HD Control
שגיאת מיקום מזערית
זמן התייצבות שואף לאפס
אין תגובת יתר בסיום ההאטה
אין תנודות במצב דומם
רטט מזערי במצב דומם
עמידות גבוהה בפני הפרעות חיצוניות
עקיבת נתיב רבת דיוק
הזנה מראש מסתגלת (Adaptive Feed-Forward)
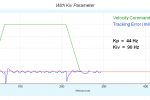
מודול ההזנה מראש המסתגלת משמש להשגת זמן התייצבות קצר. בשל החוזק הבלתי רגיל של הענפים Kiv ו-Ki רוב התגובה למשוב (פקודת הזרם) נמצאת באיבר האינטגרל. במהלך תנועה ההתאמה בין התאוצה לבין המומנט של המנוע מנוטרת ויחס זה משמש במהלך שלב ההאטה לעיבוד איבר האינטגרל.
בסיום התנועה מתאים אלגוריתם ההזנה מראש המסתגלת את תוכן איבר האינטגרל על פי תאוצת הנתיב הצפויה ומניב בכך זמן התייצבות אפס (איור 4).
כיול אוטומטי (Autotuning)
HDC משולב בסדרת בקרי הסרוו CDHD המפותחת ומיוצרת על ידי סרווטרוניקס (איור 5).
הכיול מתבצע באופן אוטומטי על ידי תוכנת הממשק של ה-CDHD, . אף על פי שהכיול האוטומטי מספיק בדרך כלל, יישומים מסוימים עשויים להיזקק לכיול ידני עדין לצורך שיפור פרמטרי הבקרה.
הכיול האוטומטי והידני מבוססים על אותו העיקרון. במהלך הכיול האוטומטי איכות התנועה נמדדת ומוערכת על ידי מנגנון ההינע ועל ידי החומרה. במהלך הכיול הידני איכות התנועה מוערכת על ידי המשתמש. בכל אחת מהשיטות, הפרמטרים של בקרת הסרוו מותאמים בהדרגה והערך שמניב את התוצאה הטובה ביותר הוא הערך שנבחר.
כיול ה-HDC פשוט ואינטואיטיבי והוא מבוצע באופן דומה לכיול PID רגיל – כל הגבר משתנה מוגבר בהדרגה עד לקבלת תנודות ולאחר מכן מופחת בכ-10 עד 20 אחוז לערך בטוח.
יישומי HD Control
יישום שער (gantry) רובוטי של לקוח סרווטרוניקס דרש דיוק מתמשך של 2 עד 3 מיקרומטר במהירות מרבית. השימוש בבקר הסרוו CDHD עם אלגוריתם ה-HDC הגדיל את המהירות המרבית של היישום מ-120 מ”מ בשנייה ל-160 מ”מ בשנייה תוך כדי שמירה על הדיוק הדרוש והניב עלייה של 33% בתפוקת המכונה.
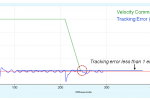
במבחן השוואה מול בקר סרוו של חברה מתחרה במהירות של 160 מ”מ בשנייה השיג ה-CDHD באופן ברור דיוק רב יותר ותנודתיות (ripple) נמוכה יותר (איור 6).
לסיכום, ה-HD Control מוכיח עצמו כמועיל במיוחד ביישומים הדורשים עקיבת נתיב מדיוקת וזמן התייצבות קצר, כגון CNC וחיתוך, מעקב מסוע, פעולות pick and place, לוחות מעגלים מודפסים, ריתוך, וכן צביעה, ציפוי והדבקה.
ד”ר איב וילרה הינו מנהל טכנולוגיה בכיר בחברת סֶרְווֹטְרוֹנִיקְס בקרת הנע
