















שימוש בפולסי אור למדידת מרחק הוא דבר ידוע. הרעיון הבסיסי הוא לשלוח פולס אור בדרך כלל באמצעות דיודת לייזר. האור נע עד אשר הוא מגיע ליעד ובו בזמן חלק מאנרגית האור משתקפת חזרה לכיוון הפולט. גלאי אשר נמצא בצמוד, קולט את האות החוזר ואת הפרשי הזמן בין השליחה של הפולס לחזרתו ובהתאם לכך קובע את המרחק של המטרה. כאשר מערכת מדידת מרחק זו מופעלת, מספר רב של נקודות (הנקראים “ענן נקודות”) יכולות להיאסף ואם אין מטרה “מוצגת” אז האור אינו יוכל לחזור. אם האור מכוון כלפי מטה לכיוון הקרקע אז הקרקע תספק החזרים ברמה מועטה. אם המטרה הוצבה בתוך ענן הנקודות נוכל לראות במידע המתקבל מעין צללית. המרחק ורוחב היעד יכולים להיקבע בצורה זו. כאשר אוסף הנקודות מעובד, אוסף ענן הנקודות מתחיל להראות כמו תמונה. ככל שענן הנקודות צפוף יותר כך התמונה תהיה עשירה וברורה יותר.
ישנם מספר מוצרים בשוק אשר יכולים למצוא מרחק בדו ממד (כלומר במישור אחד) בתצורת ענן נקודות. מוצרים אלה משמשים לעתים קרובות ביישומים תעשייתיים ולעתים אף משנים את ייעודם למערכות למיפוי, ניווט עצמאי, ושימושים אחרים. רוב המוצרים הללו מסתמכים על השימוש בזוג פולט/גלאי לייזר יחיד בשילוב מראה בעלת יכולת שינוי מיקום לקבלת אפקט סריקה על פני מישור אחד לפחות. המראה משקפת לא רק את האור הנפלט מדיודה, אלא גם משקפת את האור חזרה לגלאי. שימוש במראה מסתובבת בישום זה הוא אמצעי, בדרך כלל, להשגת תצוגה של 90 – 180 מעלות, תוך פישוט עיצוב המערכת והן את יכולת ייצורה.
מכשירים כאלה משמשים לעתים קרובות ביישומים תעשייתיים, כפי שמוצגים בתמונה מס’ 2.
יש לשים לב כי קווי הסריקה נפלטים מהיחידה והמראה המסתובבת מאפשרת לפולט / גלאי לייזר יחיד להיות מכוון לאורך המישור שנועד לסריקה באמצעות השימוש במראה מסתובבת.
יישומים רבים דורשים יותר נתונים מאשר בדו ממד ולכן ענן הנקודות של הדו ממד צריך להיות מורחב וליצור יחד ענן נקודות תלת ממדי, שבו עננים דו-ממדיים מרובים משמשים בכל “הצבעה” בזווית וגובה שונים.
אחת השיטות ליצירת ענן נקודות תלת ממדי היא להזיז את הפולט \ גלאי מעלה ומטה ובו בזמן לסובב את המראה (המכונה לעתים “קורץ”). תהליך זה יפיק נקודות בגבהים שונים, אבל בו בזמן יפחית את מספר הנקודות במרחב ובכך ענני הנקודות יהיו פחות צפופים וברזולוציה נמוכה יותר. קיימות גם יחידות “flash lidar”. יחידות אלו מאירות בו-זמנית שטח גדול ועל ידי כך לוכדות את תוצאת הנקודות – והמרחק על מערך דו- ממדי במישור ממוקד (FPA). חיישנים אלו מסובכים וקשה מאוד לייצר אותם ולכן אינם מיושמים באופן מסחרי. עם זאת צפוי כי ביום מן הימים הם יחליפו את החיישנים המכאניים מאחר והם Solid state ללא חלקים נעים.
מערכות ענן תלת ממדיות אשר קיימות במספר תצורות כמו לצרכי ניווט רכב עצמאי, מדידות ניידות ולכידת תמונות במהירות גבוהה/צפיפות גבוהה, מציבות דרישות לא מציאותיות על המערכות הנוכחיות. לדוגמא, קיימות מערכות רבות אשר ילכדו תמונה מצוינת אבל ייקח להן מספר דקות לאסוף תמונה אחת. מערכות כאלה אינן מתאימות ליישומי חישה ניידים. מצד שני, ישנן מערכות בעלות קצב עדכון גבוה אבל חסרות שדה ראיה רחב או ביצועי מדידות מרחק. ישנן מערכות בעלת קרן לייזר אחת שיכולות לספק מידע טוב ואיכותי אבל אינן עובדות בצורה טובה עם עצמים קטנים או עצמים מחוץ לתחומי מרחב המדידה.
במציאות, כדי להתאים את השימוש בחיישני LIDAR למספר גדול ביותר של שימושים, יש צורך לראות את התמונה מסביב לנקודת האיסוף כלומר ב-360 מעלות מלאות. בנוסף, עיבוד המידע צריך להיות מוצג למשתמש בזמן אמת, כך שצריך להיות מינימום עיכוב בין איסוף הנתונים לבניית התמונה. כך למשל – בסביבה של ניווט עצמאי, זמן התגובה האנושי הוא כמה עשיריות של שניה, ולכן נכון יהיה לעבוד עם מחשב ניווט בעל יכולת זמן תגובה מינימלית של עשירית שניה. כמוכן, שדה הראיה הורטיקלי צריך לכלול גם מבט עד מעל האופק למקרה שהרכב נכנס למהמורה, ובמקביל לכלול גם מבט נמוך ככל האפשר כדי לראות את הכביש מלפנים בכדי לאתר ולמנוע כניסה לשיבושים בכבישים.
יישומי חישה ניידים אחרים, מעבר לניווט עצמאי, סובלים כיום ממחסור בשיעורי צפיפות וקצבי עדכון בהשוואה לגודל האזורים הנסקרים. אפליקציות אלו כוללות מיפוי כבישים ותשתיות, ביצוע סקרים על פסי רכבת ומיפוי שטחים. נכון לעכשיו חיישנים נייחים מעוברים למשימות של חישה ניידת או טכניקות של חיישנים נייחים נמצאות בשימוש ונקראות חיישנים ניידים, גישה כגון זו מייצגת עלויות גבוהות יותר במונחים של זמן או סיכון למודדים אשר צריכים להיות נייחים זמן רב יותר בשל איטיות החיישן ובמקרים מסוימים כמו במדידת כבישים זה אף עלול להיות גם מסוכן.
חברת VELODYNE פיתחה חיישן (High Definition Lidar) בתלת ממד (3D) אשר נועד לספק את הדרישות הטכנולוגיות האחרונות בעולם בתחום הרכב העצמאי, מדידות נייחות וניידות, מיפוי, לשימושים תעשייתיים וליישומים רבים נוספים. החיישנים מספקים שדה ראיה של 360 מעלות בהגבהה של 26.5 מעלות, עד 15 פריימים בשנייה וענן נקודות עשיר המכיל מיליון נקודות יחוס לשנייה. כפי שמוצג בתמונה מס’ 4, אשר נועד לספק את הדרישות ליישומי חישה ניידים.
הדור הראשון של החיישנים היו בשימוש
ב-Challenge DARPA ב-2005 כחלק מצוות נהיגה דיגיטלי אוטומטי שבו אפשר לצוות טיוטה- טונדרה להשלים 25 מיילס של המסלול לפני שקרה כשל מכני שאינו קשור לחיישן. כתוצאה מהצלחה זו והיכולות שהפגין החיישן זה, לרבות רזולוציה, מגוון וקצב נתוני פלט וטעות שגיאת של פחות מאינץ’ אחד, יחידות החיישן שולבו במערכת הניווט העצמאיות במעל 12 צוותים ב-DARPA Urban Challenge בשנת 2007.
מבחינת יכולות החיישן – כברירת מחדל היחידה מסתובבת ב-600 סל”ד (10 הרץ), ויכולה להסתובב בין 300 ל-900 סל”ד במהירות ההבזק. קצב הסיבוב נשלט על ידי שליחת פקודת טקסט פשוטה באמצעות ממשק יציאה טורית שניתנת לשדרוג. היחידה פולטת מיליון נקודות מרחק קבועות ללא קשר למהירות הסיבוב ומתן רזולוציה אופקית וזוויתית הקטנה
מ-0.5 מעלות. היחידה מאוזנת באופן סטטי ודינמי ובכך ממזערת כל רטט הרגיש על ידי המשתמש ומספקת תמונה יציבה. ביצועים אלו, במונחים של צפיפות ענן נקודה, שדה הראייה הוא מעולה לעומת כל חיישן אחר הזמין כיום.
ובחזרה לעבודת החיישן, בתמונה מס’ 4 ניתן לראות דוגמא של תצוגה של נתונים (High Definition Lidar) באמצעות DSR. בסמוך למרכז התמונה יש נקודה לבנה מוצקה, המצביעה על עמדתו של החיישן. כל נקודת ענן שנוצרה על ידי זוגות פולט-גלאים שונים מיוצג על ידי צבע שונה. סיכום ענני נקודת הדו ממד אלו יוצר תמונת תלת ממד – למשל ביחידה המסתובבת על קרקע שטוחה, אוסף של נקודות מופיעות כעיגול רציף. החיישן מורכב על החלק הקדמי של משאית, וניתן לראות את החלק האחורי של המשאית ממש מתחת לנקודה הלבנה המוצקה. בחלק הקדמי של המשאית (והחיישן) ישנם שני כלי רכב, משאית הפונה ימינה ומכונית החולפת ברחוב, בהמשך למכונית זו התמונה מציגה הפרדה בכביש המורכבת מקרקע, מרזב מבטון ועצים.
משמאל ומימין החיישן, ניתן לראות בתמונה מדרכה שמפרידה בין הכביש והשדה ושיחים אשר ממוקמים מסביב למדרכה. ניתן לראות גם נתונים בחלקו האחורי של החיישן כמו שיש רכב מאחורי המשאית.
בתמונה ניתן גם לראות שאין הפסקות בנתונים המעגליים סביב המשאית בכל אחד מענני הנקודה. שיעור החזרה של הלייזר שהוא איטי מדי, יכול היה להביא, בכל אחד מהמעגלים, להופעת קווים מקווקווים. האזורים היחידים שבהם אין נתונים, הם בין ענני הנקודה או במקום בו השפעת ההצללה מתרחשת, בו המטרה היא בנתיב השידור האופטי. כך למשל, הריווח מאחורי החלק האחורי של המשאית הוא דוגמא להשפעת הצללה זו. בכדי להתאים את החיישן לתנאי הסביבה השונים הוא עמיד למים, כך שהפעלתו בגשם מים לא יחדרו ולא יגרמו נזקים למכלולים הפנימיים של החיישן. בנוסף, היחידה עברה מבחני הלם וטמפרטורה קיצונית כך שהיא יכולה להתאים לשימושים רבים. יש להדגיש כי החיישן בטוח לראייה בעין בלתי מזוינת ולא ניתן להשתמש בו עם אמצעים אופטיים חיצוניים להגברת הצפייה כמו משקפת.
לסיכום, טכנולוגיה ייחודית זו מאפשרת להציג כמויות גדולות של נתונים 3D ברזולוציה גבוהה, שדה ראייה רחב, צפיפות ענן נקודה גבוהה וקצב נתוני פלט גבוהים. טכנולוגיה זו מהווה את אבן הדרך האידיאלית עבור יישומים כגון ניווט עצמאי ברכב, מדידות תשתית ותצוגת מיפוי ואחזור, כמו גם יישומים רבים אחרים הדורשים איסוף נתונים בתלת ממד.
-
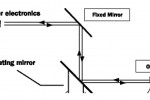
- תמונה 1. תיאור סכמטי של מערכת LiDA
-
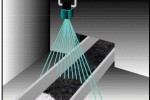
- תמונה 2. היישום התעשייתי של גלאי לייזר קונבנציונאלי
-

- תמונה Velodyne Lidar Sensor .3
-

- תמונה 4. תצוגת הנתונים של חישן דיגיטלי
