



גירוסקופי MEMS מציעים דרך פשוטה למדוד קצב סיבוב זוויתי, במארזים המתחברים בקלות לכרטיסי מעגלים מודפסים, כך שהם בחירה נפוצה כדי לשרת כאלמנט חישה משוב בסוגים שונים רבים של מערכות בקרת תנועה. בסוג זה של תפקיד, לרעש באותות קצב זוויתי (מוצאי גירוסקופי MEMS) יכולה להיות השפעה ישירה על התנהגויות מערכת קריטיות, כגון יציבות הפלטפורמה והוא לעתים קרובות הגורם המגדיר ברמת הדיוק שגירוסקופ MEMS יכול לשאת.
לכן, "רעש נמוך" הוא ערך מדריך טבעי עבור ארכיטקטי מערכת ומפתחים שלה, בשעה שהם מגדירים ומפתחים מערכות בקרת תנועה חדשות. אם ניקח ערך זה (רעש נמוך) צעד אחד הלאה, תרגום של שיקולים ברמת מערכת קריטיים דוגמת דיוק ההצבעה, לתוך מדידת רעש, שהם זמינים בד"כ בדפי הנתונים של גירוסקופי MEMS, הוא חלק חשוב מאוד של העבודה המושגית וארכיטקטונית. להבנת תלות המערכת בהתנהגויות רעש הגירוסקופ יש מספר יתרונות, כמו להיות מסוגל לקבוע דרישות רלוונטיות בשביל מרכיב חישת המשוב, או, לחליפין, לנתח את התגובה ברמת המערכת לרעש בגירוסקופ מסוים.
מאחר שלמתכנני המערכת יש הבנה טובה של קשר זה, הם יכולים להתמקד על שליטה בשני שטחי מפתח של השפעה שלהם על-גבי התנהגויות רעש בלולאות משוב הקצב הזוויתי שלהם: (1) לפתח את השיקולים המתאימים ביותר לשם בחירת הגירוסקופ MEMS ו-(2) לשמור על ביצועי הרעש המושגים במשך תהליך השילוב של החיישן.
-
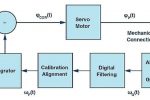
- איור 1. ארכיטקטורה לדוגמה של מערכת בקרת תנועה
-
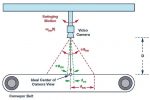
- איור 2. מערכת לבדיקת מצלמה תעשייתית
-
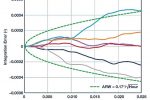
- איור 3. מהלך זוויתי אקראי (Angle Random Walk (ADIS16460)
-
- איור 4. צפיפות הרעש של ADXRS290 עם מסננים
יסודות בקרת התנועה
פיתוח של קשר שימושי בין התנהגויות הרעש בגירוסקופ MEMS וכיצד היא משפיעה על התנהגויות מערכות המפתח מתחיל לעתים קרובות עם הבנה יסודית של האופן כיצד המערכת פועלת. איור 1 מציע ארכיטקטורה לדוגמה עבור מערכת בקרת תנועה, המחלקת את מרכיבי המפתח לתוך גושים פונקציונאליים. המטרה הפונקציונרית עבור סוג זה של מערכת היא ליצור פלטפורמה יציבה עבור כל אדם או ציוד שיכולה להיות רגישה לתנועה אינרציאלית. אחד היישומים לדוגמה הוא אנטנת מיקרוגל על פלטפורמת רכב אוטונומי, המנווט דרך תנאים קשים במהירות הגורמת לשינויים פתאומיים בכיוון הרכב. ללא איזו בקרה בזמן-אמת של זווית ההכוונה, אנטנות מאוד כיווניות אלה עשויים לא להיות מסוגלות לתמוך בתקשורת רציפה, תוך כדי תגובה לסוג זה של תנועה אינרציאלית.
המערכת באיור 1 משתמשת במנוע סרוו, אשר יסתובב באופן שווה ויהפוך לסיבוב שיתר המערכת תישא. לולאת המשוב מתחילה עם גירוסקופ MEMS, השומר על קצב הסיבוב GѠ של ה"פלטפורמה המייצבת". אותות הקצב הזוויתי של הגירוסקופ המזינים את עיבוד האותות הדיגיטליים המיוחדים-ליישום הכולל סינון, כיול, כוונון ושילוב כדי ליצור משוב כיווני בזמן-אמת (E). אות הבקרה של מנוע הסרוו בא מהשואה של אות משוב זה, עם ההכוונה ה"מצווה" , (שיכולה לבוא ממערכת בקרת משימה מרכזית או פשוט לייצג את ההכוונה התומכת בפעולה אידיאלית של הציוד על הפלטפורמה.
יישום לדוגמה
מתוך המבט הארכיטקטוני של מערכת בקרת תנועה באיור 1, הגדרות ותובנות בעלות ערך ייערכו גם מניתוח של תכונות פיסיקליות, מיוחדות ליישום. עיין באיור 2, המציע מראה
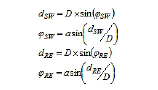
מושגי של מערכת בדיקה אוטומטית של קו ייצור. מערכת מצלמה זו בוחנת עצמים בנעים בתוך ומחוץ לשדה הראייה שלה על רצועת מסוע. בסידור זה, המצלמה מתחברת לתחקרה דרך כן ארוך, הקובע את גובהו (ראה "D" באיור 2), במטרה לייטב את שדה הראייה שלו עבור ממדי העצמים שהוא יבחן. מאחר שבתי-חרושת הם מלאי מכונות ופעילות אחרת, המצלמה יכולה לשאת תנועת נדנדה (ראה " SWѠ" באיור 2) לעתים, דבר שעשוי לגרום לעיוות בתמונות הבדיקה.
הקווים האדומים המקווקווים בדיאגרמה זו מספקים מבט מוגזם של השגיאה הזוויתית הכוללת (ᵠSW±) הבאה מתנועת הנדנדה והקווים המקווקווים הירוקים מציגים את רמת השגיאה הזוויתית אשר תתמוך במטרות איכות התמונה של המערכת (ᵠRE±). המראה באיור 2 מגדיר את מדידת רמת המפתח של המערכת (עיוות התמונה) במונחים של שגיאת התזוזה הליניארית (dSW, dRE) על משטח הבדיקה. תכונות אלו מתייחסות לגובה המצלמה (D) ואיברי השגיאה הזוויתית (ᵠSW,ᵠRE) דרך יחס טריגונומטרי פשוט במשוואה 1.
הטכניקה הישימה ביותר של בקרת תנועה עבור מערכת מסוג זה ידועה כייצוב התמונה. מערכות ייצוב תמונה מוקדמות השתמשו במערכות משוב מבוססות-גירוסקופ כדי להזין טכנולוגיית מנועי סרוו, המתאימים את כיוון חיישן התמונה במהלך הזמן שהצמצם פתוח. ההופעה של טכנולוגיית MEMS סייעה להקטין את הגודל, העלות וההספק של פונקציות אלו בצורה מהפכנית, דבר אשר הוביל לשימוש רחב יותר של טכניקה זו במצלמות דיגיטליות חדישות. התקדמויות הטכניקות של עיבוד תמונה דיגיטלית, אשר עדיין משתמשות במדידות קצב זוויתית מבוססות MEMS, הובילו לביטול מנוע הסרוו ביישומים רבית.
באם ייצוב התמונה נובע ממנוע סרוו או דרך עיבוד דיגיטלי מאוחר של תיקי התמונה, התפקיד הבסיסי (חיש. משוב) של הגירוסקופ נשאר זהה, כמו גם התוצאה של הרעש שלו. לשם פשטות, דיון זה מתמקד בגישה הקלאסית (מנוע סרוו על חיישן התמונה) כדי לבחון את יסודות הרעש הבולטים ביותר, וכיצד הם מתייחסים לתכונות הפיסיקליות החשובות ביותר של סוג זה של יישום.
הליכה בזווית אקראית
(Angle Random Walk – ARW)
לכל גירוסקופי ה-MEMS יש רעש במדידות הקצב הזוויתי שלהם. רעש חישה בלתי-נמנע זה מייצג את השינוי האקראי במוצא הגירוסקופ, כאשר הוא פועל בתנאי אינרציה (ללא תנועה סיבובית) וסביבתיים (ללא רעידות, הלם וכד'). המדידה המקובלת ביותר שדפי הנתונים של גירוסקופי ה-MEMS מציעים כדי לתאר את התנהגויות הרעש שלהם הם צפיפות רעש הקצב (Rate Noise Density – RND) והליכה אקראית זוויתית (Angular Random Walk – ARW). פרמטר ה-RND משתמש אופיינית ביחידות של מעלות/שנייה/הרץ) ומספק דרך פשוטה לחזות את הרעש הכולל, במונחים של קצב זוויתי, מבוסס על היענות התדר של הגירוסקופ.
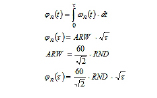
הפרמטר ARW משתמש אופיינית יחידות של מעלות/שעה והוא בד"כ יותר שימושי כאשר מנתחים את השפעת הרעש על הערכת הזווית לאורך פרקי זמן מסוימים. משוואה 2 מציע נוסחה גנרית להערכת הזווית, מבוססת על מדידת קצב הזווית. בנוסף, הוא מספק גם נוסחה פשוטה המייחסת את פרמטר ה-RND לפרמטר ה-ARW. יחס זה מהווה התאמה קטנה (FFT חד-צדדי לעומת דו-צדדי) מזו שב-IEEE-STD-952-1997 (נספח C).
איור 3 מספק ייחוס גראפי, המסייע לתמוך בדיון נוסף של ההתנהגות המיוצגת על-ידי פרמטר ARW. הקווים הירוקים המקווקווים באיור זה מייצגים את התנהגות ה-ARW כאשר לגירוסקופ יש RND של 0.004degrees/sec/Hz, השווה ל-ARW של 0.17degrees/Vhou, הקווים המוצקים מייצגים 6 שילובים נפרדים של מוצא הגירוסקופ הזה, במהלך מחזור של 25 מילי-שניות. האופי האקראי של שגיאות הזווית, ביחס לזמן, מראה שהשימוש העיקר של ה-ARW הוא בהערכה של הפילוג הסטטיסטי של שגיאות הזווית במהלך זמן אינטגרציה מסוים. רשום גם שסוג זה של היענות מניח את השימוש בסינון מעביר גבוהים כדי להסיר את שגיאות המימתח ההתחלתיות בתהליך השילוב.
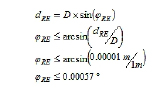
בחזרה אל דוגמת היישום באיור 2, שילוב של משוואת 1 ו-2 מספק הזדמנות לייחס שיקולים חשובים (עיוות פיסיקאלי על משטח הבדיקה) למדידת ביצועי הרעש (RND, ARW) שהם מצויים בד"כ בדפי הנתונים של גירוסקופי MEMS. בתהליך זה, בהנחה שזמן השילוב (τ) ממשוואה 1 שווה לזמן לכידת התמונה מספק פישוט אחר שעשוי להיות שימושי. משוואה 3 משתמשת ביחס הגנרי של משוואה 1 כדי להעריך כאשר המצלמה נמצאת 1 מטר (D) מחוץ למשטח הבדיקה והשגיאה המותרת המרבית היא 10 מיקרומטר (dRE), השגיאה הזוויתית מהגירוסקופ (φRE) צריכה להיות פחות מ-0.00057 מעלות.
משוואה 4 משלבת את התוצאות ממשוואה 3 והיחס הגנרי במשוואה 2 כדי לחזות דרישות ARW ו-RND עבור גירוסקופ ה-MEMS במצב מיוחד. תהליך זה מניח שזמני לכידת התמונה של 35 מילי-שניות מייצגים את זמן השילוב (τ) ממשואה 2, דבר המוביל לתחזית שה-ARW של הגירוסקופ צריך להיות פחות מ-0.18degrees/hour1/2, או שה-RND צריך להיות פחות מ/-0.0043degrees/sec/Hz1/2 כדי לתמוך בדרישה זו. כמובן, זה עשוי לא להיות הדרישה היחידה שפרמטרים אלה תומכים, אך היחסים הפשוטים האלה מספקים דוגמה על כיצד לייחס את הדרישות והתנאים הידועים.

רעש קצב זוויתי כנגד רוחב-פס
מפתחי המערכות המספקות בקרת כיוון קציפה עשויים להעדיף את הערכת השפעת הרעש במונחים של קצב זוויתי, מאחר שהם עשויים שלא יהיה להם זמן שילוב קבוע כדי לקבוע את היחס המבוסס ARW. הערכת הרעש במונחים של קצב זוויתי מחייב לעתים קרובות שיקול של פרמטר ה-RND והענות התדר בשרשרת אותות הגירוסקופ. היענות התדר של הגירוסקופ מושפעת לעתים קרובות על-ידי הסינון, התומך בדרישות מיוחדות ליישום של שיקולי יציבות הלולאה וביטול היענות החיישן הבלתי-רצויה לאיונים סביבתיים כגון רעידה. משוואה 5 מספקת דרך פשוטה להעריך את הרעש הקשור להיענות תדר מסוימת (רוחב פס הרעש) ו-RND.
כאשר היענות התדר של RND עוקבת אחר פרופיל מסנן מעביר נמוכים חד-קוטבי או דו-קוטבי, רוחב-הפס של הרעש (fNBW) מתייחסת לתדר הקיטעון של המסנן בהתאם ליחסים במשוואה 6.
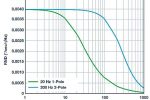
לדוגמה, איור 4 מציע שתי עקומות ספקטראליות שונות עבור הרעש ב-ADXRS290, שהוא בעל RND של 0.004degrees/sec/VHz. בעקומה זו, העקומה השחורה מייצגת את היענות הרעש כאשר משתמשים במסנן דו-קוטבי, מעביר נמוכים, שהוא בעל תדר קיטעון של 200 הרץ מסנן, בעוד העקומה הכחולה מייצגת את היענות הרעש כאשר משתמשים במסנן חד-קוטבי, מעביר נמוכים, שהוא בעל תדר קיטעון של 20 הרץ מסנן. משוואה 7 מספקת חישובים עבור הרעש הכולל של כל אחד ממסננים אלה. כמצופה, לגרסת ה-200 הרץ יש רעש גבוה יותר מאשר לגרסת ה-20 הרץ.
![]()
במקרה שהמערכת דורשת סינון מיוחד, אשר היענות התדר שלו אינה תואמת את הדגמים הפשוטים של קוטב יחיד וקוטב כפול במשוואות 6 ו-7, משוואה 8 מציעה יחס יותר כללי לשם חיזוי של הרעש הכולל:
בנוסף להשפעה על הרעש של קצב זוויתי כולל, מסנני הגירוסקופ גם תורמים השהיית מופע אל היענות הלולאה הכוללת, לה יש השפעה ישירה על גורם איכות אחר במערכות בקרת משוב: גבול המופע בתדר שוויון של שבח יחידה. משוואה 9 מציע נוסחה להערכת השהיית המופע (Ɵ) שמסנן בעל קוטב יחיד (fc=תדר קיטעון) תהיה על היענות התדר של לולאת הבקרה בתדר ההצטלבות של השבח יחידה (f0). שתי הדוגמאות במשוואה 9 מציגות את השהיית המופע בתדר הצטלבות של שבח יחידה של 20 הרץ, עבור מסננים בעלי תדרי קיטעון של 200 ו-60 הרץ בהתאמה. השפעה זו על שולי המופע יכולה להוביל להגדרה של רוחבי-פס של גירוסקופ שהם פי 10 גדולים יותר מאשר תדר ההצטלבות של שבח יחידה, דבר שיכול להפעיל עוד יותר דגש על בחירה של גירוסקופ MEMS בעל רמות RND חיוביות.
![]()
מערכות בקרה חדישות מציעות מסנני תנופה דיגיטליים, שיכולים לשאת דגמים שונים לשם חיזוי את השהיית המופע שלהם בתדרים קריטיים עבור לולאת הבקרה. לדוגמה, משוואה 10 מציגה נוסחה לחיזוי השהיית המופע (Ɵ) הכרוכה עם מסנן FIR בעל 16 סנפים (NTAP) הפועל בקצב עידכון (fs) של ה-ADXRS290 של SPS 4250, באותו תדר הצטלבות (fc) בשבח יחידה של תדר של 20 הרץ. סוג זה של יחס יכול לסייע בקביעת המספר הכולל של סנפים שארכיטקטורת מערכת יכולה להרשות עבור סוג זה של מבנה מסנן.
סיכום
הקו התחתון הוא שלרעש בלולאות משוב בקצב זוויתי יכולה להיות השפעה ישירה על שיקולי ביצוע-מפתח במערכות בקרת תנועה, כך שיש להתחשב בכך, מוקדם ככל האפשר בתהליך התכנון של מערכת חדשה. לאלה שיכולים לכמת כיצד רעש קצב הזוויתי עשוי להשפיע על התנהגויות ברמת המערכת יהיה להם יתרון משמעותי לעומת אלה שרק יודעים שהם צריכים "רעש נמוך". הם יוכלו לקבוע מטרות ביצועים היוצרות ערך מורגש ביישומים שלהם והם יהיו במצב מצוין כדי לכמת תוצאות ברמת המערכת כאשר מטרות אחרות של הפרויקט מעודדות שיקול של גירוסקופ MEMS מסוים.
לאחר שהבנה בסיסית נקבעת, מתכנני מערכת יכולים להתמקד על זיהוי גירוסקופ MEMS העונה לדרישות הביצועים שלהם, תוך שימוש במדידות של רוחב פס, צפיפות רעש קצבי או הליכה בזווית אקראית כדי לכוון את השיקול שלהם. בשעה שהם מסתכלים על ייטוב ביצועי הרעש שהם מגלים מהחיישנים שהם בוחרים, הם יכולים להשתמש בקשרים עם רוחב-פס (רעש קצב זוויתי) וזמן שילוב (שגיאת זווית) כדי להזין הגדרות ברמת מערכת אחרות חשובות אשר יתמכו בביצועים המתאימים ביותר עבור היישום.
ראה גם:
The battle between MEMS and FOGs for precision guidance
MEMS gyroscope precision inertial sensing in harsh, high temperature environments
Accelerometer and Gyroscope Sensors: Operation, Sensing and Applications
What are the most useful sensors?
