















תקציר
מאמר זה מציג טכנולוגיה חדשנית, הרשומה כפטנט, למבנה מערכת בקרת תנועה המשלב באופן אופטימאלי את היתרונות של מערכת בקרה ממורכזת עם היתרונות של מערכת בקרה מבוזרת תוך כדי ביטול כמעט מוחלט של החסרונות הקיימים בכול אחת מן השיטות. מוצרים ממשפחה זו זמינים לשימוש מידי.
הלוגו של הטכנולוגיה החדשה: Centralized Network Control מצביע על השילוב בין שתי התפיסות (מערכת ממורכזת ומערכת מבוזרת עם תקשורת דיגיטלית) ועל החדשנות הגלומה בשילוב זה.
מימוש מערכת בקרה בטכנולוגיה זו מבטיח יישום מהיר ללא עקומת לימוד (לכול מי שנכווה במימוש מערכת EtherCAT…), ביזור, מודולריות וגמישות, כבלים קצרים ובקרה וסנכרון באיכות הגבוהה ביותר, וכול זה בעלויות ייצור מופחתות.

טבלה 1
רקע
עולם בקרת התנועה, במאבק בין מערכת בקרה ממורכזת ומערכת בקרה מבוזרת כשיטה המובילה את השוק, עבר, כעובדה מוגמרת, למבנה מבוזר של מערכות בקרה. החסרונות של מערכת ממורכזת (חוסר גמישות, כבלים ארוכים וקשים לתחזוקה, אמינות נמוכה) לא אפשרו לשיטה זו להמשיך להתקיים לאורך זמן. וזאת במיוחד אל מול השיפורים בביצועי התקשורת במערכות המבוזרות (שהינן צוואר הבקבוק של הגישה המבוזרת). טכנולוגיית EtherCAT הולכת ונהיית הדומיננטית בתחום זה בהובלה ודחיפה של השוק האירופאי.
אבל אליה וקוץ בה. מערכת בקרה מבוזרת מבוססת EtherCAT רחוקה מלהיות פתרון מושלם. למערכת חסרונות רבים ובראשם מחיר, סיבוכיות, מגבלות סנכרון וקצב/יכולת עדכון של כול משתני המערכת. חסרונות אלו מוכרים היטב לכול מי שביצע, או ניסה לבצע, את המעבר מבקרה ממורכזת לבקרה מבוזרת מבוססת EtherCAT.
נטיית השוק לעבור למערכת מבוזרת, עקב החסרונות של מערכת בקרה ממורכזת, אינה מבטלת את היתרונות של מערכת בקרה ממורכזת. יתרונות אלו מוקרבים על מזבח המעבר למערכות מבוזרות. ליווי שביצענו למספר לא קטן של פרויקטים שביצעו, בלית ברירה, את המעבר הזה, הראה בבירור את הקשיים ואת התהליכים הנדרשים, לאורך חודשים ושנים, להטמעת מערכת מבוזרת מבוססת EtherCAT.
החסרונות של מערכת מבוזרת מבוססת EtherCAT הולכים ונעשים בולטים יותר ויותר ככול שמספר יחידות הקצה יורד. במערכות של 4-5 צירים (וכמובן ב-2 ו-3 צירים) הסיבוכיות והמחיר הנוספים במערכת EtherCAT הינו כמעט בלתי נסבל בהשוואה למערכת בקרה ממורכזת.
טבלה 1 (בעמוד הבא) מציגה את היתרונות והחסרונות של כול אחת מהשיטות (הרשימה אינה מתייחסת למוצרי חברה מסוימת, וכמובן שיש הבדל בין מוצרי החברות השונות. הרשימה מתייחסת לתכונות הבסיסיות של הטופולוגיה עצמה).
מאמר זה מציג את טכנולוגיית Central-i, שהינה טופולוגיה חדשה למערכות בקרה, המאחדת את היתרונות של שתי השיטות שתוארו לעיל, ומבטלת את רוב החסרונות. טכנולוגיה זו רשומה כפטנט וזמינה לשימוש מידי.
טבלה 2
טכנולוגיית Central-i, מבנה עקרוני, יתרונות וחסרונות
בטכנולוגיית Central-i (סנטראל-אי) ישנו בקר מרכזי המבצע את כול חישובי מסלולי התנועה (כמו במערכת מבוזרת) אך גם את כול חוגי הבקרה (כמו במערכת ממורכזת).

-

- איור 1. מבנה טיפוסי של מערכת Central-i
-

- איור 2. מבנה כללי של מערכת Central-i, דוגמא ל-4 צירים
בטכנולוגיית סנטראל-אי יחידות הקצה (Amplifiers, I/O units…) נמצאות ליד המנוע (כמו במערכת מבוזרת) ויש גמישות מלאה לבחור את יחידת הקצה המתאימה ביותר למנוע (כמו במערכת מבוזרת) ולחבר את המנוע בכבלים קצרים ופשוטים (שוב, כמו במערכת מבוזרת).
בטכנולוגה זו החיבור ליחידות הקצה הינו באמצעות תקשורת דיגיטלית (כמו במערכת מבוזרת) אך בקצב עדכון הזהה לקצב עדכון הבקרה ובסנכרון מלא המובנה בטופולוגיה עצמה, בין כול הצירים (כמו במערכת ממורכזת).
בטכנולוגיית סנטראל-אי יחידות הקצה הינן יחידות ללא מעבד וללא זיכרון (יחידות הספק וממשקים בלבד!) ומכאן שכול משתני הצירים הבודדים ומשתני המערכת זמינים בכול רגע בבקר המרכזי (כמו במערכת ממורכזת). כמו כן, פשטות יחידות הקצה מבטיחה הקמה פשוטה של המערכת, ללא עקומת לימוד, בשקיפות מלאה למשתמש, מחיר ייצור נמוך ליחידות הקצה ואמינות גבוהה של יחידות הקצה.
הטכנולוגיה הזו מאפשרת מעבר אל עולם הבקרה המבוזרת, ללא “תשלום”. לא בסיבוכיות, לא בעקומת לימוד, לא בביצועי הבקרה הרב ציריים, לא באמינות ולא במחיר הכולל של המערכת.
מערכת בקרה בטכנולוגיית סנטראל-אי אינה מושלמת אף היא. היא יורשת חיסרון (אחד ויחיד) מבין כול החסרונות של שתי השיטות שהוצגו למעלה: מערכת זו אינה מתאימה למספר רב מאוד של צירים. פתרון זה הינו אופטימאלי למערכות של 2 עד 8 צירים, סביר למערכות של 8 עד 12 צירים ופחות מתאים למערכות עם יותר צירים מסונכרנים. עם זאת, בשימוש בשני מאסטרים (או יותר) בהנחה שלא נדרש סנכרון בין שתי קבוצות הצירים, הטופולוגיה מתאימה גם למספר צירים רב.
הדור הבא של מערכות סנטראל-אי יבטיח פתרון מלא ומסונכרן גם למספר רב של צירים. עם זאת, אנו מתמקדים בטכנולוגיה זו במערכות של עד 8 צירים (מסונכרנים), בשלב זה.
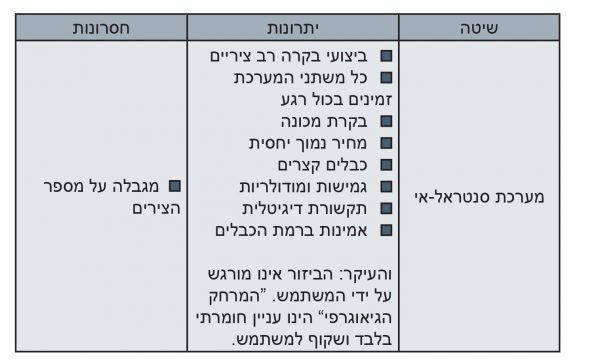
טבלה 2 (בעמוד השני) מציגה את יתרונות (והחיסרון) של מערכת סנטראל-אי.
באיור 1 ניתן לראות את הבקר המרכזי ואת יחידות הקצה (מרחק כבלים של עד 10 מטר ויותר), כאשר יחידות הקצה הינן יחידות הספק וממשק בלבד, ללא מעבד. הכבלים למנועים קצרים וניתן לבחור יחידת קצה מתאימה לכול תפקוד נדרש.
יש לציין שחישובי המסלולים, כמו גם בקרת המיקום/מהירות/זרם מבוצעות בבקר המרכזי וקצב עדכון התקשורת הינו 61 מיקרו שניות (בכול 61 מיקרו שניות מתבצעת תקשורת דו כיוונית, מסונכרנת, בין המאסטר וכול אחת מיחידות הקצה).
חיבור התקשורת הינו בפורמט כוכב (Star) ומכאן שה-throughput המערכתי הכולל הינו גבוה ביותר (אפילו גבוה מזה של EtherCAT) וזאת למרות שתדר התקשורת עם כול יחידת קצה אינו גבוה במיוחד (ושוב: אמינות).
יתרונות נוספים (!) למערכת סנטראל-אי, שניתן לציין בשלב זה לאחר שטופולוגיית חיבור הכוכב הוצגה:
1. קצב תקשורת מערכתי גבוה מזה של EtherCAT.
2. קצב תקשורת נמוך בערוץ התקשורת, מכאן אמינות וחסינות לרעש.
3. ניתוק של יחידה בודדת אינו משפיע בשום צורה על הערוצים (הצירים) האחרים, וזאת שוב, ללא צורך באלגוריתם או תהליך מיוחד. זה נובע מהטופולוגיה עצמה.
4. במידה ויש יחידת קצה שנמצאת בקצה של מערכת נעה, נכנס אליה רק כבל בודד דרך השרשרת. וזאת לעומת מערכת EtherCAT שבה יש כבל תקשורת נכנס וכבל יוצא.
5. כול היחידות מסונכרנות אל המאסטר (ובינן לבין עצמן, עד רמת ה-PWM) וזאת מבלי לבצע שום תהליכים מורכבים של סנכרון שעון, אלא רק מתוך הטופולוגיה עצמה.
6. רמת סנכרון של ננו שניות בודדות. אפשרות מובנית להתחשב באורך הכבל במידה ונדרש.
טכנולוגיית Central-i, תיאור טכני מפורט
נקודת המפתח שעמדה בבסיס הרעיון של טכנולוגיה זו היא שהביזור אינו באמת נדרש ברמת הבקרה! אין דרישה אמיתית לבזר את תוכנת הבקרה בין צירים (להפך, בקרה מרכזית הינה יתרון!).
הביזור הנדרש הינו ביזור של יחידות ההספק (למקם אותן ליד המנועים) ושל הממשקים למנוע ולמשובים (אנקודרים, קווי I/O) וזאת על מנת למנוע את הכבלים הארוכים והמסובכים שהיו בפתרון הממורכז. גם הגמישות הנדרשת הינה ברמת יחידת ההספק (מתח, זרם, הספק, סוג מנוע) ולא ברמת יכולת החישוב לכול ציר באופן עצמאי.
מעולם לבקר מרכזי לא הייתה בעיה בעובדה שהוא חישב את כול אלגוריתמי הבקרה (להפך, זה יתרונו!). הבעיה הייתה הביזור והמודולריות של יחידות הקצה: הספק וממשקים.
אם כך, למה בכלל צריך יחידת קצה “חכמה” (או: “אינטליגנטית”)? הטענה שלנו היא שהחוזק (ההולך וגובר) של יחידת הקצה נובע רק מתוך המבנה הלא אופטימאלי של מערכות הבקרה המבוזרות ובראשון, כאמור, EtherCAT. עם הצורך לעמוד בדרישות החישוביות הגבוהות של תקשורת EtherCAT והסנכרון סביב תקשורת זו והצורך לבצע את חישובי הבקרה של כול ציר. השורה התחתונה היא מערכת כבדה, מסובכת ויקרה. היא אומנם מודולרית ברמת יחידות הקצה, אבל מסובכת מבחינת הקמת המערכת והלימוד/תחזוקה שלה. וכמובן, בהתאם גם המחיר של כול יחידת קצה.
הרעיון שעומד מאחורי מערכת Central-i הינו שונה מהותית בשני מובנים עיקריים ובשלישי נוסף:
1. החיתוך בין הבקר המרכזי ובין יחידת הקצה אינו מתבצע ברמת פקודת המיקום אלא ברמה הרבה יותר נמוכה: למען הפשטות בואו נניח: פקודת PWM וממשקי דגימת זרם ומיקום.
2. מבנה התקשורת הוא בצורת כוכב, ככה שהתקשורת עם כול יחידה הינה פשוטה מאוד והסנכרון וחוסר התלות בין הצירים הינו פועל יוצא מידי של הטופולוגיה.
3. התקשורת, שהינה דיגיטלית ופשוטה ביותר, מתבצעת בין שני FPGA. מעין “מתיחה” של חיבור חומרה מקומי לכבל ארוך עם תקשורת דיגיטלית. מכאן שאין צורך במעבד ביחידה המרוחקת שאינה מבצעת שום פעולה חישובית. ביזור מושלם של ההספק והממשקים בלבד!
התוצאה היא פשוטה ביותר. בקר מרכזי רגיל לחלוטין שמצד אחד מבצע את כול תהליכי התנועה והבקרה (ברמת הציר, ברמת הרב-צירי וברמת המכונה) בדיוק כמו הבקרים הממורכזים הישנים והטובים (גליל, פתרונות בקרה, MEI, ACS ורבים אחרים) אבל מצד שני, ברמת החומרה בלבד, ללא מעורבות של המעבד, מתבצע ביזור מלא של יחידות ההספק והממשקים השונים.
בכך מערכת סנטראל-אי מיישמת את כול היתרונות של כול אחת מהשיטות.
משתמש במערכת סנטראל-אי אינו “מרגיש” את הביזור. מבחינתו יש בקר תנועה אחד, שמכיל את כול הנתונים ולכן ניתן לבצע בו בקרה בכול הרמות (ציר, רב צירי ומכונה) מבלי להיות מוטרד כהוא זה בגין זמינות המידע וקצב זמינות המידע.
עם זאת, מקים המערכת מבחינת החומרה, רואה את הביזור והמודולריות בדיוק כמו במערכת מבוזרת מבוססת EtherCAT.
החזון של מערכת מבוזרת שניתן לבנות כמו אבני לגו מתממש במלואו במערכת המבוססת על טכנולוגיית סנטראל-אי.
והמחיר? הפחתה ניכרת במחיר המערכתי מתקבלת עקב הפשטות של הקמת המערכת ובכך שאין צורך בתהליך למידה והטמעה של חודשים ושנים. יחד עם זאת, גם יחידות הקצה, שהינן פשוטות ככול האפשר (ללא מעבד וללא דרישות כוח חישוב) מציגות עלויות ייצור מופחתות לעומת אלו של בקרה מבוזרת טיפוסית, כגון EtherCAT.
ומה אם?
משתמש שיבסס את מערכת הבקרה של על טכנולוגיית Central-i עלול להיתקל בדרישה ליחידת קצה (מגבר) בהספק (או אפיון טכני אחר) שאולי לא זמין כרגע בטכנולוגיה זו (דבר זה עלול לקרות כמובן גם בכול טכנלוגיה אחרת, אם כי כמובן פחות בטכנולוגיות שנמצאות בשוק שנים רבות). בדיוק כדי לפתור קשיים כאלו, טכנולוגיית סנטראל-אי כוללת מוצרים מסוג Adapter המאפשרים לחבר את רשת סנטראל-אי לכול מגבר סטנדרטי ובכך להרחיב את מערכת סנטראל-אי ללא מגבלה.
תוכניות לעתיד:
תוכניות החברה כוללות:
1.הרחבת קו מוצרי החברה בטכנולוגיית סנטראל-אי.
2. מזעור המוצרים כך שיתאימו לאינטגרציה בתוך מנועים, סיבוביים וליניאריים. בכך נביא למקסימום את הביזור האמתי שנמצא בלב הטכנולוגיה.
3. פתיחת הטכנולוגיה ליצרנים נוספים באופן שיאפשר את קבלתה כסטנדרט בינלאומי.
4. פיתוח הדור הבא של הטכנולוגיה שיתמוך במספר רב של צירים.
טכנולוגיית סנטראל-אי מפותחת בתמיכה של קרן סינגפור ישראל (SIIRD) הפועלת מטעם רשות החדשנות וה- EDB מסינגפור למידע נוסף בקרו באתר חברת אגיטו.
אייל ספיר הינו מייסד ובעלים משותף של חברת אגיטו מערכות הינע. אייל הינו בעל ניסיון רב שנים בתחום בקרת התנועה, בארץ ובעולם (Control and Robotics Solutions, Servotronix, Elmo Motion Control) ועוסק בפיתוח ושיווק מוצרי מערכות בקרה (אלגוריתמים, תוכנה וחומרה) מזה כ-30 שנה.
