



בעת בחירת מנוע צעד סיבובי או מפעיל לינארי המבוסס על מנוע צעד מומלץ להתחשב בפרמטרים שונים אשר עשויים להשפיע על ביצועי הרכיב ובכך להשפיע על היישום עצמו. להלן מספר שיקולים לצורך בחירת הרכיב הנכון עפ"י חברת Haydon Kerk, יצרנית מובילה של מנועי צעד ומפעילים לינאריים:
- מאפיינים מכניים כגון: טווח המהירויות הנדרשות ביישום, עומס מקסימלי וסוג העומס, אוריינטציית ההתקנה וציר התנועה, תנאי סביבה.
- מאפיינים חשמליים כגון: זרמי הפעולה ביחס לזרם הנומינלי, מתחי אספקה, סוג הדרייבר (לרוב Chopper או L/R)
- רזולוציות ודיוקי הצעד לינאריים או הסיבוביים הנדרשים. בנוסף סוג הצעד שיידרש מהמנוע (שלם, חצי, רבע, שמינית).
ספקים של מנועי צעד סיבוביים מספקים גרפים של מהירות כפונקציה של מומנט של מגוון המנועים שלהם. לעומת זאת ספקים של מפעילים לינאריים מבוססי מנועי צעד מספקים גרף של מהירות כפונקציה של כוח. הגרפים הנ"ל מסופקים בנוסף למאפיינים המכניים (הכוללים גם מידות פיזיות) והחשמליים של המנוע.
מנוע צעד סיבובי:
הגרף המופק ומסופק עבור מנוע צעד סיבובי מייצג ערכי מומנט Pull-Out מקס' בטווח של קצבי צעד שונים (משמע במהירויות שונות) הישימים עבור כל דגם של מנוע צעד. או מדידת מומנת ה-Pull Out בכל מהירות מתבצע ע:י הרצת המנוע במהירות הספציפית והגדלת עומס המומנט הסיבובי המנוגד עד לנקודה בה המנוע מגיע לנק' ה-Stall. ערך מקסימלי זה הינו הערך המיוצג בגרף אל מול המהירות הרלוונטית.
עבור מנועי צעד המומנט הנ"ל מיוצג ביחידות Newton-centimeters ו/או ounce-inches. המהירות מיוצגת ביחידות של צעד מלא או חצי צעד לשנייה. עבור מנועים סוג זה, ערך צעד שלם הינו לרוב בזוויות של 0.45°, 0.9°, 1.8°, 3.75°,7.5°,15°,18°.
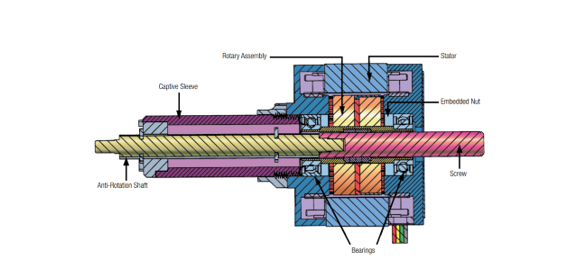
איור 1 – איור חתך של מפעיל לינארי מבוסס מנוע צעד של חברת Haydon Kerk
מפעיל לינארי מבוסס צעד סיבובי:
הגרף המופק עבור מפעיל לינארי מבוסס צעד סיבובי מייצג ערך כוח Pull-In אל מול קצבי שינוי כמות צעדים ליח' זמן (כלומר, מהירות הסיבוב של מנוע צעד). אחת השיטות למדידת כוח ה-Pull-In עבור כל רמת מהירות הינה ע"י התקנת המפעיל באוריינטציה אנכית כאשר הציר/בורג הנעה מופנה כלפי מעלה. ע"י הרצת המנוע בכל כיוון לינארי במהירות ספציפית מופעל כוח צירי נגדי לכוח הצירי המתקבל בציר המפעיל אשר מוגדל אינקרמנטלית עד לקבלת הכוח המקסימלי עבור המנוע להגעה לנק' Stall. כל הרצה מתבצעת ללא תאוצה ותאוטה.
עבור מפעיל לינארי מבוסס מנוע צעד הכוח הינו ביחידות מדידה של Newton או Ounce-Force או Pound-Force. המהירות מיוצגת ע"י צעד מלא או חצי צעד לשנייה. גדלי הצעד האופייניים עבור מפעילים אלו הינם זהים למנועי צעד סיבובים. מאפיין הרזולוציה מבוסס על קומבינציה של זווית של צעד מלא וגודל מידת ה-Pitch של בורג ההובלה.
לסוג הדרייבר המשמש להנעת המנוע או המפעיל עשוי להיות השפעה משמעותית על עקומות המומנט כפונקציה של מהירות או כוח כפונקציה של מהירות.
בנוסף, ההגדרות שמוטמעות בדרייבר ו/או גודל המתח המסופק לדרייבר עשוי להשפיע על הביצועים המתקבלים במנוע צעד סיבובי ומפעיל לינארי מבוסס צעד סיבובי.
הגדרות הדרייבר יכולות לכלול זרם "הרצה", זרם "אחיזה", סוג הצעד (שלם, חצי, רבע וכו') וכל פרופיל תנועה הכולל האצה והאטה.
דרייבר מסוג L/R (דרייבר "מתח קבוע"):
דרייבר L/R, המוגדר גם כדרייבר "מתח קבוע", הינו מסוג השראה/התנגדות. עבור פעולה נורמלית וממושכת של מנוע צעד או מפעיל לינארי מבוסס צעד בטמפ' החדר המתח ביציאה (הנמדד בחוטי המנוע) מוגדר כשווה למתח בליפופי המנוע.
בגרף מספר 2 ניתן לראות ביצועי מנוע צעד סיבובי. הדוגמא למנוע צעד סיבובי המופעל ע"י דרייבר מסוג L/R מיוצגת ע"י עקומה 1:1 Voltage Ratio. המומנט המתקבל קטן בטווח צר מאוד של מהירויות, בעיקר כתוצאה מהשראות בליפופים וכתוצאה מכוח Back-EMF במנוע.
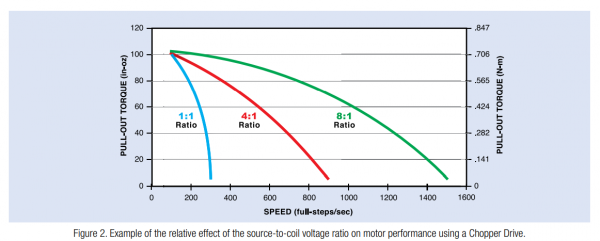
איור 2 – דוגמא להשפעה היחסית של יחס המתחים בין הספק למתח הסלילים על ביצועי המנוע בשימוש בדרייבר Chopper
דרייבר מסוג Chopper (דרייבר "זרם קבוע"):
דרייבר מסוג Chopper הינו דרייבר "זרם קבוע". מקור השם נגזר מהטכניקה לצורך בקרה על הזרם המופק, ע"י הפעלה וכיבוי של מקור מתח חיצוני (Chopping) בתדירויות מעל לטווח הקול הנשמע.
עבור הפעלה ממושכת של מנוע צעד או מפעיל צעד בטמפ' החדר הזרם שמתקבל מהדרייבר הינו שווה ערך לזרם האופייני בנק' העבודה הנומינלית של המנוע.
עקומות 4:1 ו-8:1 בגרף מספר 2 מציגות ביצועים משופרים ביחס לדרייבר L/R (יחס 1:1 במתחים). יחסי מתחים מעבר ל-12:1 יביאו לשיפורים זניחים מעבר למתקבל בנק' זאת.
ערכי המומנט המתקבלים גבוהים נשארים יחסית גבוהים לאורך טווח רחב יותר של מהירויות בעיקר בגלל מקור מתח גבוה אשר עוזר להתגבר על השראות הליפופים ו-Back EMF.
השפעות של Current Starving על מנוע צעד סיבובי או מפעיל מבוסס מנוע צעד:
המומנט המתקבל ממנוע צעד סיבובי או לחילופין הכוח המתקבל ממפעיל לינארי מבוסס צעד, הוא פרופורציונלי לאמפר-סיבוב. בטווח המהירויות הנמוכות, למתח המתקבל מדרייבר L/R או גודל הזרם המתקבל מדרייבר Chopper, יש השפעה משמעותית על המומנט או הכוח. הגדרה של מתח בדרייבר L/R נמוך ממתח הסלילים של המנוע בנק' העובדה או הגדרה של זרם בדרייבר Chopper הנמוך מהזרם בנק' העבודה של המנוע, יגרום ל-Current Starve ויביא לטורק או כוח נמוכים מהנדרש.
בטווח המהירויות הגבוהות יותר, יחס בין המתח במקור המתח למתח בסלילי המנוע בנק' העבודה הופך למשמעותי, עקב התלות של האימפדנס בסלילים בתדירויות גבוהות (עקב השראות) ו-Back-EMF גבוה. יחסי מתחים גבוהים יותר יאפשרו הגדלת הזרם בסלילים והגעה לערכים הנדרשים כאשר רוחב האותות עבור כל צעד הינו גבוה וככל שתדירות האותות גדלה.
תנאים של Current Starving במנועי צעד:
מומנט המתקבל מהנעה סיבובית או כוח המתקבל מהנעה לינארית עשויים לקטון משמעותית עקב הפסדים פנימיים במנוע עקב חיכוך במסבים, או Pre-Load במסבים כדוריים. ניתן להגיע לתוצאות שונות בייצור, Pre-Load שונה במסבים והגדרות שונות של טולרנסים.
ערכי המומנט או ערכי הכוחות המתקבלים עשויים להתקבל נמוכים מהנדרש עקב הפסדים פנימיים כתוצאה ממומנטי התנגדות הנוצרים בתוך המנוע. במנועים המספקים מומנטים גבוהים או מפעילים בעלי מגנטים בעלי אנרגיה גבוהה יחסית, לרוב יהיו מומנטי התנגדות פנימיים ויפיקו מומנט נמוך יחסית ביציאה ממנועים או אקטואטורים סטנדרטיים באותם התנאים.
מומנט האינרציה של הציר הינו ערך נתון בכל סוג של מנוע וגודל, ועשוי להשפיע על הביצועים בעת במהלך האצה והאטה של המנוע (בכל שינוי של המהירות).
במפעיל לינארי עשויים להיות הפסדים נוספים בכוח הצירי המתקבל עקב מומנט גרר במעבר ברכיבים בהן מועברת תנועה סיבובית לתנועה קווית (ממשק בורג הנעה-אום). ההפסדים הנ"ל עשויים אף לגדול כאשר המנוע מופעל במצב של Current Starve.
עשויים להיות הבדלים בביצועים בין מנוע למנוע עקב הפסדים פנימיים כאשר מנוע או מפעיל עם אספקת מתח נמוכה מהנדרש.
עשויים להיות אספקטים מועילים עבור יישומים עם עומסים נמוכים כמו למשל תנועה חלקה יותר, רעש מופחת, פחות רעידות והקטנת הרזוננס.
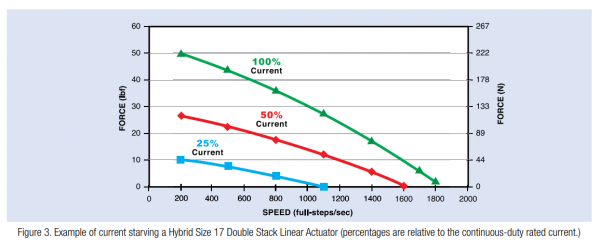
איור 3 – דוגמא ל-Current Starving של מפעיל לינארי המבוסס על מנוע צעד היברדי NEMA 17 של חברת Haydon Kerk (האחוזים מבטאים יחס אל מול הזרמים הנדרשים בנקודת העבודה)
לצרוך המחשה פשוטה יותר של השפעת ההפסדים הפנימיים כאשר מנוע צעד סיבובי במצב של Current Starve נכמת את הזרם באחוזים. לשם דוגמא ניקח בחשבון את מומנט הגרר של המסבים הפנימיים ביחס למומנט של המנוע. בדוגמא זאת נניח שניתן ליצור מנוע צעד סיבובי מיוחד ואידיאלי ללא חיכוכים (וללא מומנט גרר) במסבים, אפילו ב-pre-load אופייני.
נניח כי מנוע זה יכול לייצר מומנט של 100 in-oz במהירות של 500 full step/sec תחת עבודה בזרם הנדרש בנק' העבודה. בהזנה של המנוע בחצי וברבע מהזרם הנדרש במהירות הנ"ל המנוע האידאלי המתואר יפיק מומנט של 50 in-oz ו-25 in-oz בהתאמה.
כל זה נכון למנוע דמיוני, אך אם ניקח מנוע אמיתי, ולאחר pre-load של המסבים מתקבל מומנט גרר כולל של 10 in-oz במהירות של 500 full-step/sec. כאשר המנוע מוזן ב-100% מהזרם בנקודת העבודה, מומנט הגרר עקב החיכוך במסבים (הגורם להפסדים פנימיים) יהווה 10% של כלל המומנט המופק מהמנוע. לעומת זאת, כאשר המנוע יוזן בחצי מהזרם הנדרש בנקודת העבודה אותם הפסדים יהוו 20% מהמומנט הניתן להפקה מהמנוע. כאשר המנוע יוזן ברבע מהזרם מהערך הנדרש בנק' העבודה ההפסדים במומנט עשויים להגיע אף לכ-40% מהמומנט המופק מהמנוע.
לסיום:
ישנם שיקולים רבים אשר נדרש לקחת בחשבון בעת בחירת מנוע צעד או מפעיל לינארי המבוסס על מנוע צעד, עבור יישומים הדורשים רכיבי הינע. חשוב מאוד לקחת בחשבון: סוג הדרייבר, מתח סלילי המנוע בנקודת העבודה, וערכי זרמי "Run" ו-"Hold" מתאימים עבור האפליקציה.
מאמר זה תורגם ע"י דימה גרינשטיין, מהנדס מכירות ואפליקציה בחברת מדיטל קומוטק – הנציגה הבלעדית של Haydon Kerk Pittman בישראל.
©AMETEK, Inc. All rights reserved. Translated and distributed with permission from AMETEK Haydon Kerk Pittman. www.haydonkerkpittman.com






