















בשנים האחרונות, עם ההתקדמות הטכנולוגית בתחומי המוליכים למחצה, האלקטרוניקה, האופטיקה ותעשיות נוספות, עלתה הדרישה לבצע הנעה ברזולוציות ודיוקים גבוהים יותר. פתרון נפוץ לכך הוא שימוש באקטואטורים מבוססי מנוע פיאזואלקטרי.
החומר פיאזואלקטרי (“פיאזו”) התגלה בשנת 1880-882 ע”י שני חוקרים, אחים צרפתיים, Pierre Curie ו- Jacques Curie. הפיאזו הוא חומר קרמי או גבישי, שמשנה את צורתו כאשר הוא מוזן מתח חשמלי. למעשה, החומר גם מייצר מתח חשמלי כאשר משנים לו את הצורה, או מפעילים עליו כוח. לצורך הפשטות ניתן להגיד, שחומר פיאזואלקטרי מתרחב כאשר הוא מקבל מתח חיובי ומתכווץ, כאשר הוא מקבל מתח שלילי. קיימים סוגים רבים של חומרים פיאזואלקטריים, שלא יורחבו בכתבה זו ויש להם יישומים רבים ומגוונים.
עקרון פעולה ליישומי הנעה מדוייקת
בתעשייה קיימות כמה שיטות לביצוע הנעה באמצעות מנועים פיאזואלקטריים. בכתבה זו תפורט שיטת Stick-Slip, כפי שמיושמת על ידי חברת Attocube מגרמניה.
מבנה האקטואטור הוא שולחן הנעה מיניאטורי, המורכב על מסילות הנעה ומתחתיו מנוע פיאזו, שמחזיק את השולחן באמצעות חיכוך. התנועה נוצרת בשלושה שלבים:
1 – מנוחה.
אין מתח על הפיאזו. הציר מוחזק מהחיכוך עם הפיאזו.
2 – תנועה.
עליית מתח הדרגתית, מרחיבה את הפיאזו ובעזרת החיכוך השולחן נע x∆. אורך התנועה יהיה תלוי בגובה המתח למנוע וביכולת של הפיאזו להתרחב. מדובר בכמה עשרות ננומטרים.
3 – החלקה. הורדה מהירה של המתח מחזירה את הפיאזו במהירות למקומו הראשוני. כתוצאה מהתנועה המהירה, החיכוך קטן והשולחן אינו חוזר עם הפיאזו, אלא שומר על מקומו.
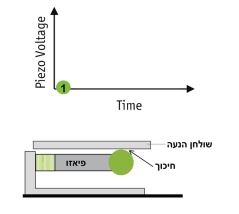
מצב 1 – מנוחה: אין מתח על הפיאזו.
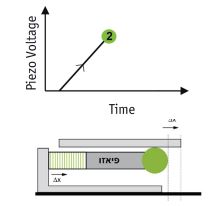
מצב 2 – תנועה: תזוזה של הפיאזו מרחק של x∆ ומזיז את שולחן ההנעה.
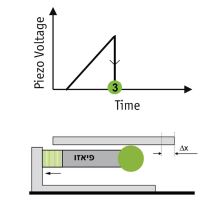
מצב 3 – החלקה: הפיאזו חוזר במהירות גבוהה למקומו הראשוני ללא החזרת שולחן ההנעה.
מחזור כזה של שלושת השלבים הנ”ל יוצר תנועה קטנה אחת – צעד באורך שלx ∆, כ-1 מיקרומטר למשל. גובה המתח ייקבע את x ∆. התנועה הכוללת מורכבת מצעדים רבים. מערכת בקרה ייעודית שולטת על התנועה בעזרת הפקת פולסים בצורת “שן-מסור”, שיוצרים את התנועה הנדרשת ברזולוציות גבוהות מאוד. כאמור, כל צעד הוא תנועה של 50 ננומטר והוא מיוצר על ידי עליה הדרגתית וירידה מהירה של המתח, אך קיימת אפשרות להעלות את המתח באופן חלקי ולהגיע למיקום הרצוי גם ברזולוציות טובות מננומטר בודד, בתוך תחום ה- x∆.
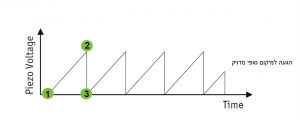
איור: פולסים חשמליים לפיאזו: הגעה למיקום סופי מדויק
התיאור לעיל לעקרון הפעולה מתייחס לתנועה ליניארית בציר בודד, אולם ניתן לבצע תנועה בשני צירים ליניאריים על אותו שולחן הנעה (X,Y). קיימים סוגים נוספים של תנועה: הנעה לגובה (Z), הנעה סיבובית (Rotator) וגוניומטרים ( Theta (Θ)/Phi (Φ) Pitch/Roll – ).
לצורך הגעה למיקום אבסולוטי מדויק, המערכת בדרך כלל תכלול אמצעי מדידה, כגון אנקודר, פוטנציומטר, או חיישן מיקום אחר. סגירת חוג הבקרה מתבצע על ידי מערכת הבקרה הייעודית. הדיוק הסופי יהיה תלוי גם באמצעי המדידה. למשל, כדי להגיע לדיוקים של ננומטר בודד, משתמשים בדרך כלל באינטרפרומטר בעל דיוק גבוה, או אנקודר ברזולוציה גבוהה מאד.
מדידת המיקום באמצעות פוטנציומטר. במדידת המיקום באמצעות פוטנציומטר ניתן לקבל דיוק של מיקרון (μm) והוא מתאים לעבודה בטמפרטורות נמוכות במיוחד.
מדידת המיקום באמצעות אנקודר אופטי. השימוש באנקוד אופטי עם סקאלה מזכוכית מאפשר רזולוציית מיקום של 1 ננומטר והדירות של 50 ננומטר. הוא מתאים לעבודה גם תחת שדה מגנטי חזק, עד 7T ועמיד בשינויי טמפרטורה, עקב פיזור תרמי מופחת.
מדידת המיקום באמצעות אינטרפרומטר. לדיוק הגבוה ביותר משתמשים בחיישן מיקום אינטרפרומטרי, סדרת IDS של Attocube. רזולוציית המדידה היא 1 פיקו-מטר! (pm), הדירות של 2 ננומטר, אפילו בטמפרטורות קריוגניות, בוואקום וכו’.
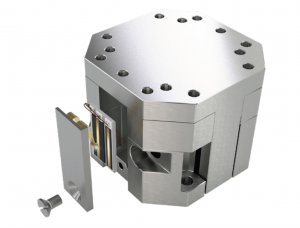
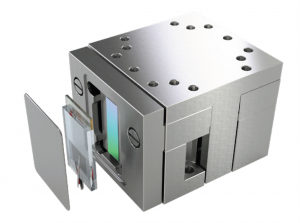
אקטואטורים פיאזואלקטריים לעבודה בואקום גבוה מאד (HUV) תוצרת Attocube, גרמניה.
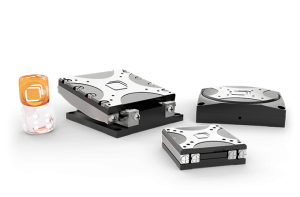
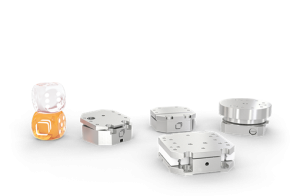
אקטואטורים פיאזואלקטריים תוצרת Attocube, גרמניה.

אקטואטורים פיאזואלקטריים תוצרת Attocube, גרמניה.
יתרונות וחסרונות
יתרונות:
- רזולוציה ודיוק גבוהים, סדרי גודל של ננומטרים (nm).
- קומפקטיות.
- הפרעות מגנטיות נמוכות מאד ביחס לשיטות הנעה אחרות.
- עמידות לסביבה רועשת / מגנטית.
- אפשרות לעבודה תחת ואקום.
- עמידות בטמפרטורות נמוכות עד 0 מעלות קלווין.
- צריכת אנרגיה נמוכה.
- עבודה בסביבה נקייה, בחדרים נקיים.
- אפשרות לשמירה על מיקום ללא צורך בהחזקת מתח.
- הנעה ישירה ללא תמסורת.
- אפשרות לקביעת המיקום בצורה ידנית, כאשר מתגברים על החיכוך.
- מתחי עבודה לא גבוהים: עשרות וולטים בלבד.
חסרונות:
- מגבלות העומס/משקל שניתן להניע, ביחס למערכות הנעה אלקטרומגנטיות או הנעה באמצעות מנועי סטפר.
- מכיוון שעקרון הפעולה מבוסס על חיכוך, ייתכן בלאי בנקודות החיכוך לאחר שימוש ממושך.
- מחזור הפעולה של הצעדים במערכות מסוימות (שאינן אולטראסוניות) יוצר רעש (צפצוף) בתדר הפולסים.
הרעש הזה יישמע אם המערכת פועלת בסביבה עם אוויר ולא בתנאי וואקום. - מערכת הבקרה צריכה להיות מתוחכמת ומדויקת ועליה לכלול מערכות הספק בתדר גבוה.
דוגמאות ליישומים
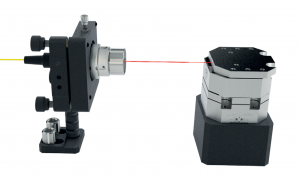
בתעשיית הסימקונדקטור: כיוון קרן לייזר (Beam Steering). אחד האתגרים הקשים, הוא להגיע לדיוק גבוה בכיוון המיקום והזווית של רכיבים אופטיים כגון פילטרים, עדשות ומראות. כל אלמנט צריך להתכוון בשש דרגות חופש. למשל, במכונות לבדיקת וויפרים באולטרה-סגול (DUV) משתמשים באקטואטורים פאיזואלקטריים ליניאריים ברזולוציה של ננומטר (nm), באקטואטורים סיבוביים וגוניומטרים ברזולוציה של מיקרו-רדיאן (µrad). בנוסף לדרישות דיוק אלו, המערכת נדרשת לעמוד בדרישות עמידות מכאנית לתדרי תהודה גבוהים ועבודת תחת ואקום גבוה מאד (UHV).

מערכת לכיוון קרן לייזר המורכבת ממערכות הנעה פיאזואלקטריות המניעות רכיבים אופטיים.
מיקרוסקופים ומכשירי מדידה מדוייקים: אותו עקרון מיושם גם במערכות מיקרוסקופיות הדורשות כיוונים מדויקים. למשל כיוון קרן אלקטרונים (Electron-Beam Systems), במיקרוסקופים אלקטרוניים (Transmission Electron Microscope-TEM).
בנוסף, במערכות של מיקרוסקופים מורכבים נדרשת הנעה מדויקת לחלק הנמדד/הנצפה. מערכות פיאזואלקטריות מתאימות למשימה זו.
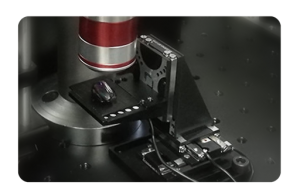
שולחן הנעה פיאזואלקטרי בשלושה צירים למיקרוסקופ.
יישומים בחלל: למערכות בחלל, כגון לוויינים, נדרשת הנעה בדיוק גבוה ובתנאים של קרינה, טמפרטורה נמוכה וללא אוויר וכן עמידות להלמים ורעידות במהלך שיגורם לחלל.
סיכום.
תעשיות הדורשות דיוקים בסדרי גודל של ננומטרים לרוב ימצאו שמערכות ההנעה הפיאזואלקטריות נותנות מענה לדרישותיהם. בתעשיות אלו, בדרך כלל תימצאנה דרישות לעבודה בוואקום ובתנאים קריאוגניים, כלומר בטמפרטורות נמוכות מאד. מערכת הבקרה והממשק למנועי הפיאזו הן אינטואיטיביות, פשוטות לתפעול ולהבנה, אך מאחוריהן קיים אלגוריתם חזק שמאפשר את רמות הדיוק הכל כך גבוהות. בבחירת המוצר המתאים יש להתחשב בדרישות: טמפרטורת הסביבה, האם נדרשת עמידות לשדה מגנטי, האם העבודה בוואקום – אם כן – איזה ואקום, האם יש מגבלות גודל פיזי, האם יש דרישה לבקרה בחוג סגור או שנדרש מידע על המיקום האמיתי – באיזו רזולוציה/דיוק. כמובן קודם יש לקבוע איזו סוג תנועה נדרשת, מה טווח התנועה ובכמה צירים.
