















לעיתים מערכת הזיהוי של המכונית האוטונומית לא מזהה רכב חירום עם אורות מהבהבים שעצר בצד הדרך. אילו פתרונות טכנולוגיים לבעיה הזו מתכוונים החוקרים לפתח?
שנים האחרונות אנו עדים לשינוי בתרבות הנהיגה, הנובע מההתפתחויות הטכנולוגיות בתחום החומרה והתוכנה – ובעיקר מהופעתן של המכוניות האוטונומיות. החלק העיקרי בכלי הרכב הללו הוא מחשב שעליו מותקנת תוכנה עם בינה מלאכותית. תפקידה של התוכנה דומה לזה של המוח האנושי האנליטי: עליה להחליט מה לעשות על סמך קלט שמתקבל מחיישנים, כגון מצלמות, לייזר, מכ”ם ועוד.
כמו הנהג האנושי, כך גם הנהג המלאכותי – תוכנת הבינה המלאכותית – אינו חף מטעויות, אף שהן שונות מאוד. בעוד שחלק מהתאונות שמעורב בהן נהג אנושי תלויות בגורמים כמו עייפות או חוסר ריכוז, טעויות הנהג המלאכותי נובעות מהתוכנה עצמה, למשל, פענוח שגוי של הקלט.
גם מחשב יכול לטעות
מכונית אוטונומית מסתמכת בעיקר על קלט חזותי, תמונתי, ועל היכולת להבחין בין עצמים שנמצאים בסביבתה: הכביש, הנתיבים, תמרורים וכלי רכב אחרים. היכולת הזאת היא קריטית: תארו לעצמכם מה יקרה אם מחשב הרכב לא יזהה כלי רכב אחר שעצר בהמשך הנתיב.
מודל התוכנה שאחראי על זיהוי העצמים הוא מורכב ביותר, אך באופן בסיסי מדובר במערכת קוד שאומנה על מאגר מידע מסוים. כלומר, בהינתן מספר גדול של תמונות שבהן עצמים שונים, כגון מכונית, אופנוע או משאית, האלגוריתם לומד כל אחד מהם ומסווג אותם. לאחר שלב האימון, כשמתקבלת תמונה חדשה, הפלט של המודל הוא התמונה עצמה, כך שכל עצם שהוא זיהה בה מוקף במלבן עם מספר בין אפס לאחת שמדרג את ודאות הזיהוי. לאחר מכן המידע מהפלט מוזן לשלב הבא במערכת, שם מתקבלות ההחלטות על פי דרגת הזיהוי. נהוג להגדיר סף ודאות, למשל 0.7, כשכל מספר שגבוה ממנו יזוהה כעצם אמיתי.
פעולה חשובה זו אולי נראית פשוטה במבט ראשון, אך היא מסובכת בשל המגוון העצום של כלי הרכב הנוסעים בכבישים. כמו כן, תנאי התאורה ומזג האוויר המשתנים משפיעים על הקלט התמונתי שמוזן למערכת ומקשים על פעולות הזיהוי והסיווג. לכן, מפתחי התוכנה של המכוניות האוטונומיות נתקלים באתגרים לא פשוטים במצבים חריגים שמזדמנים בכבישים. מקרה אחד כזה עורר גל של התעניינות.

תמונה 2: נורת האזהרה המהבהבת מפחיתה מאוד את מידת הוודאות של הזיהוי כ”מכונית”. ניידת משטרה עם אורות מהבהבים קרדיט: Kreative Baacha, Shutterstock באדיבות מכון דוידסון לחינוך מדעי, הזרוע החינוכית של מכון ויצמן למדע.
מה מבלבל את המודל?
מתברר שכלי הרכב של חברת טסלה מתקשים להתמודד עם ניידות בעלות תאורת אזהרה (צ’קלקה) שעצרו בצד הדרך בתנאי חשכה. למעשה, דווחו לא פחות מ-16 תאונות שבהן רכבי טסלה התנגשו בכלי רכב כאלה. בתחקיר של משרד התחבורה של ארצות הברית נטען כי האשמה העיקרית היא של הנהגים שהיו לא מספיק ערניים.
חוקרים מאוניברסיטת בן גוריון, בשיתוף פוג’יטסו היפנית, ביקשו להבין את ההיבט הטכני של הכשל ולמצוא לו פתרון. הם כינו את הבעיה EpileptiCar, צירוף של המילים “אפילפסיה” ו”מכונית” באנגלית. כדי להבין את מקור הבעיה השתמשו החוקרים במצלמות ומודלים שונים לזיהוי עצמים והשוו ביניהם. הם צילמו סרטונים שהציגו במשך חצי דקה רכב שתאורת האזהרה שלו כבויה וחצי דקה נוספת שבה היא פעלה. לאחר מכן הפרידו את הסרטון לתמונות (פריימים) המרכיבות אותו והניחו למודל הזיהוי לנתח אותן ולקבוע את מידת הוודאות. כך נוצר תהליך שבו הוזן במודל מספר גדול של תמונות שבהן תאורת האזהרה כבויה, ולאחר מכן רצף של תמונות שבהן אור האזהרה נכבה ונדלק לסירוגין.
כפי שאפשר לראות בתרשים, תאורת האזהרה אכן מצליחה לבלבל את המודל וגורמת לתנודתיות בוודאות הזיהוי של הרכב. כדי לבסס את הטענה ערכו החוקרים בדיקה נוספת, שבה הם בחנו את התדירות שבה תאורת האזהרה נכבית ונדלקת, ומצאו כי היא 1.3 הרץ. כלומר 1.3 מחזורים בשנייה. ואכן זה בדיוק קצב השינוי בין הוודאות ואי-הוודאות בפלט המודל.
אם כך, מדוע תאורת האזהרה גרמה לירידה החדה ברמת הזיהוי של המודל? כל תמונה מורכבת מאוסף של נקודות (פיקסלים), וכל פיקסל מורכב משלושה ערכים מספריים שמייצגים את כמות האור האדום, הירוק והכחול. על פי החוקרים, הבעיה היא בחלוקת הצבע הכחול בתמונה, ובייחוד באזור המכונית החונה, שמשתנה עקב הבהוב נורת האזהרה וכך משנה את הקלט של המודל.
משהבעיה הובנה, החוקרים עברו לחפש פתרון – “תרופה”, שאותה כינו בשם Caracetamol, על בסיס המילה פרצטמול – תרופה לשיכוך כאבים. כפי שהזכרנו, המודל מזהה העצמים מאומן על מאגר מידע שמסומן מראש. התמונות מהסרטון שמתקבל ממצלמת כלי הרכב מועברות למודל שמזהה את העצמים ומעביר את המידע הלאה. החוקרים בעצם הוסיפו שכבות נוספות לתהליך הזיהוי. ראשית, עם קבלת כל תמונה בדקו החוקרים אם קיימת נורת אזהרה. אם לא, התמונות הועברו למודל מזהה העצמים הרגיל. אם אכן זוהתה נורת אזהרה, התמונה הועברה למודל זיהוי נוסף שהותאם לכלי רכב עם נורות אזהרה. לבסוף, פלטי כל המודלים שולבו יחד בפלט אחיד.
החוקרים הצליחו לשפר את תנודתיות המודל בהשוואה למודל הזיהוי המקורי. בממוצע, הוודאות המינימלית עלתה ב-0.21, הוודאות הממוצעת ב-0.27, והוודאות המקסימלית ב-0.07. בנוסף נרשמה ירידה של 0.19 בטווח הוודאות, כלומר ההפרש בין הוודאות המקסימלית למינימלית, שמייצגת שיפור משמעותי ביציבות המודל. השלבים הנוספים אומנם האריכו את זמן הניתוח, אך לטענת החוקרים לא מדובר בתוספת שתכביד על משאבי מחשב הרכב.
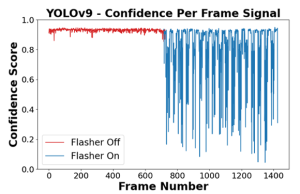
תמונה 3: ודאות הזיהוי של עצם מסוג מכונית לפי פריים. הקו האדום מסמל את הזמן שתאורת האזהרה כבויה והקו הכחול את הזמן שתאורת האזהרה דולקת | קרדיט: מתוך Feldman et al באדיבות מכון דוידסון לחינוך מדעי, הזרוע החינוכית של מכון ויצמן למדע.
ומה הלאה?
החוקרים לא השתמשו במצלמות ובמודלים של כלי רכב אוטונומיים של טסלה, אלא במצלמות מסחריות רגילות ובמודלי זיהוי שמפורסמים בקוד פתוח. כמו כן הם התקשו למצוא מאגרי מידע של תמונות כלי רכב עם תאורת אזהרה בחושך, וכמובן ככל שמאגר המידע גדול יותר – אמינותו גבוהה יותר.
מערכות טכנולוגיות מבוססות בינה מלאכותית יתפסו בוודאי מקום גדל והולך בחיינו בעתיד. עם זאת, עדיין יש בהן כשלים מסוכנים, ויש מי שמפקפקים בבטיחותן ובמוסריות של השימוש בהן. יש הטוענים כי כבר כיום מדינות נעזרות במערכות אלו במלחמות, ויש אפילו שמועות על מערכות בינה מלאכותית שתקפו מטרות בלי שקיבלו הוראה לעשות זאת. בנוסף לדיונים האלה, מתעוררות לא מעט שאלות בנוגע לזכויות היוצרים על התוכן ששימש לאימון הבינה המלאכותית.
באדיבות מכון דוידסון לחינוך מדעי, הזרוע החינוכית של מכון ויצמן למדע.
■ קישור לכתבה
■ אתר מכון דוידסון לחינוך מדעי
https://davidson.weizmann.ac.il/
תמונת כותרת: על תוכנת הבינה המלאכותית להחליט מה לעשות על סמך קלט שמתקבל מחיישנים, כגון מצלמות, לייזר, מכ”ם ועוד. מכוניות חשמליות של חברת טסלה
