














מאת: Yan Vainter, Freescale
מאמר זה מתאר מגמות בשוק התקני דחיפה של בקרת מנועים במכשירים ביתיים, מציג את בקר האותות הספרתיים של Freescale ל-32 סיביות הפועל ב-100 מגה-הרץ, שהוכרז לאחרונה, ואשר מתאים במיוחד ליישומים של בקרת סינוסוידאלית למנועים כפולים ללא חיישנים ומתמקד בבקרה וקטורית, ללא חיישנים, של מנוע מגנט קבוע ובמימושה של בקרה זו באמצעות בקר DSC (מיקרובקר עם מעבד אותות ספרתיים) של Freescale.
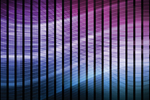
איור 1 תרשים בלוקים של MC56F84xx
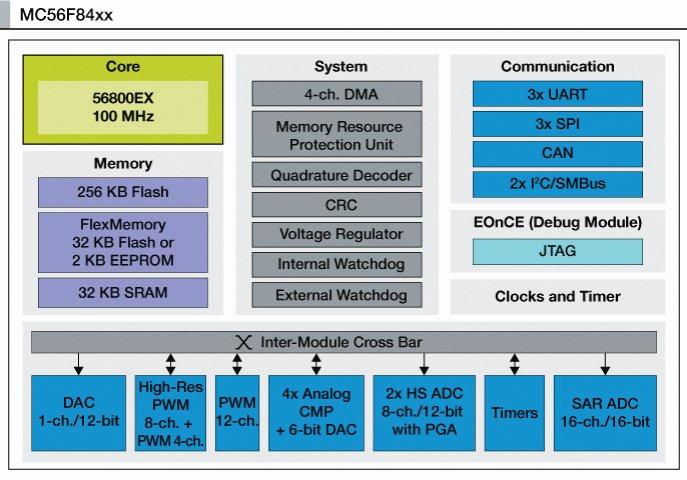
איור 2. בקרת מנועים כפולים עם תיקון גורם הספק שמופעלת באמצעות MC56F84xx
התקני דחיפה של מנועים מהווים חלק בלתי נפרד של מגוון מכשירים ביתיים, לרבות מכונות כביסה, מדיחי כלים, מייבשי כביסה, מקררים, מערכות מיזוג אוויר ועוד רבים אחרים. הדרישות מהתקני דחיפה של מנועי מכשירים ביתיים עברו שינוי של ממש במרוצת השנים האחרונות. הדחף לביצוע שינויים כאלו הוכתב על ידי דרישות הבטיחות ומתוך הדרישה להיות ידידותיים לסביבה, וכן מדרישות הביצועים וכמובן מעלות הייצור, אשר הוצבו מול המכשירים הביתיים. אחת הדרישות העיקריות היא הדרישה לנצילות גבוהה, אשר מכתיבה את השימוש במנועים עם נצילות אנרגיה גבוהה שמחוברים לאלגוריתמי בקרה מתקדמים, הן לצורך בקרת מנועים וגם לבקרה על המכשיר הביתי עצמו. דרישות הביצועים מקיפות פעולת מנוע במהירויות משתנות עם דינמיקה גבוהה ועם טווח רחב של מהירות פעולה. הדרישה לרעש אקוסטי נמוך מעדיפה את התקן הדחיפה הסינוסואידלי על פני בקרת קומוטציה פשוטה. מנועים א-סינכרוניים חד-פאזיים ומנועים אוניברסאליים, מוחלפים בימים אלו במנועים תלת פאזיים – מנועי השראת זרם חילופין, מנועי זרם ישר חסרי מברשות, ובעיקר מנועים סינכרונים בעלי מגנט קבוע (PMSM) – כולם כאלו שעונים על הדרישות המוזכרות לעיל. לעתים קרובות, מתבקשת בקרה וקטורית של מנוע השראה בזרם חילופין או של מנוע סינכרוני בעל מגנט קבוע. בקרה וקטורית מספקת ביצועים דינמיים מעולים, מנצלת את מלוא היכולת של מומנט המנוע במהירות נמוכה, מבצעת בקרה של המנוע בנצילות גבוהה מאוד בכל נקודת פעולה שבטווח מהירויות רחב ומאפשרת קיומה של בקרה נפרדת עבור מומנט המנוע ועבור השטף שלו. ומעבר לכך, הצורך בגורם יחידה להספק בכניסה מוביל למימוש של מעגל תיקון גורם הספק (PFC).
הפתרון הטכני עבור התקני דחיפת מנועים נמצא, לעתים קרובות, בקצה הגבולות הטכניים, ובמידה רבה, המניע שלו הוא העלות. המנועים עוברים אופטימיזציה בכל הנוגע לגודלם ולעלות החומרים שלהם, עובדה שמניבה לעתים קרובות פרמטרים של מנוע לא-ליניארי, אשר משתנים עם השתנות טמפרטורת המנוע ושינוי הזרם. החומרה האלקטרונית פשוטה ככל שאפשר – המתכננים מסירים משימוש לא פעם רכיבים אנלוגיים מדויקים ויקרים, ותחתם מממשים אלגוריתמי תוכנה ייעודיים. חיישן המיקום של המנוע או חיישן המהירות שלו יקרים למדי, לכן המפתחים מתמקדים בפעולה ללא חיישנים, כאשר מהירות המנוע ומיקומו מחושבים מתוך המתח המופעל, הזרם שנוצר ומפרמטרים של המנוע, בעזרת שיטות הערכה מתמטיות מתקדמות. כתוצאה, בקרת המנוע כבר אינה אלגוריתם פשוט, אלא מערכת מורכבת שדורשת הן בקרי מיקרו בעלי ביצועים גבוהים עם התקנים היקפיים ייעודיים וגם אלגוריתמים מתקדמים לבקרת מנועים.
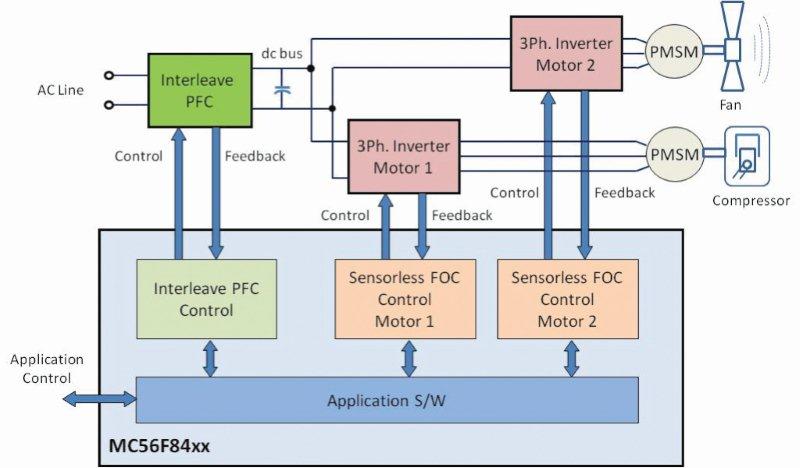
איור 3. בקרה וקטורית ללא חיישנים של מנוע מגנט קבוע סינכרוני.
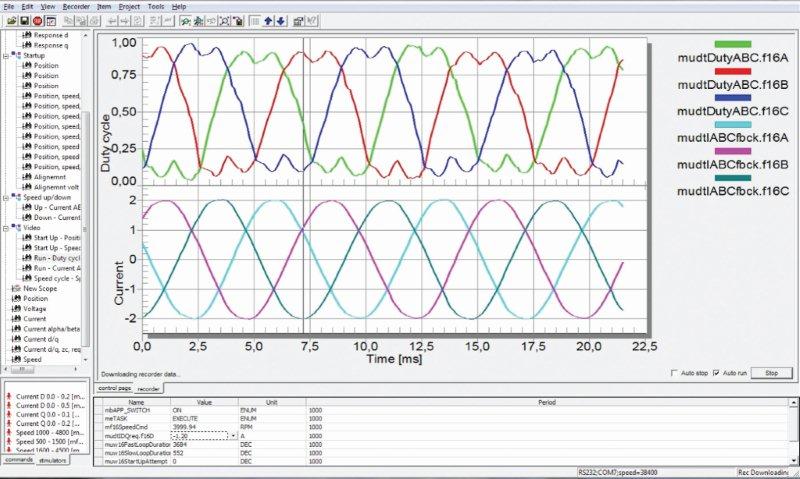
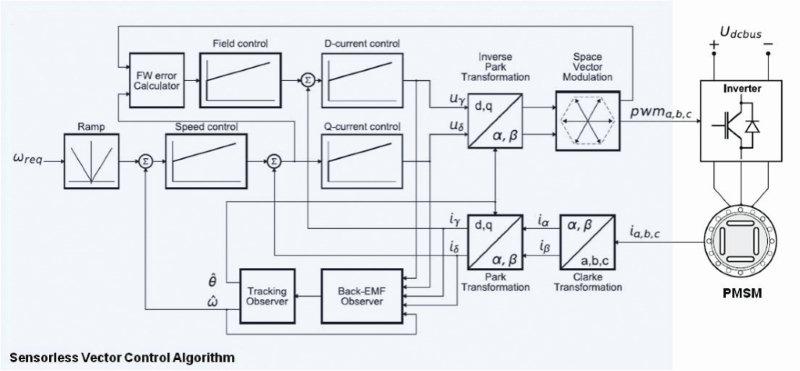
איור 4. הכלי FreeMASTER לניפוי שגיאות, לניטור ולצפייה בנתונים – בזמן אמת
בחלק מהמכשירים הביתיים פועל יותר ממנוע אחד. דוגמה אחת היא מדיח עם משאבת מים ועם התקן הינע עיקרי, או יחידת מיזוג אוויר שבה פועלים הן מדחס וגם מניפת אוויר. באופן מסורתי, מנועים אלו היו נדחפים על ידי מעגלים אלקטרוניים נפרדים. ואולם, הלחץ להגיע לעלות מזערית הניב התקני דחיפה שמבקרים שני מנועים במקביל, כשהם משתמשים בבקר מיקרו יחיד, ועל ידי כך מקטינים למינימום את הצורך בשכפולם של רכיבים אלקטרוניים יקרים.
הנצילות הגבוהה, הביצועים הגבוהים והגישה לחסכון בעלויות, התאפשרו עם יציאתם לשוק של מיקרובקרים ייעודיים שמשלבים ביצועים גבוהים, התקנים היקפיים ייעודיים ועלויות סבירות. חברת Freescale מציעה משפחה מקיפה של בקרי אותות ספרתיים (DSC) שעונים באופן מתאים במיוחד על הדרישות של מכשירים ביתיים מתקדמים עם בקרת מנועים. משפחת בקרי DSC מציעה פתרונות שעברו אופטימיזציה עבור המרה ספרתית של הספק לבקרת מנועים ספרתית ולעוד יישומים רבים אחרים, אשר להם נדרשת מהירות גבוהה ויכולת של חוג בקרה בעל רזולוציה גבוהה. תיק המוצרים של בקרי DSC משלב את יכולת העיבוד של מעבד אותות ספרתיים (DSC) ואת הפונקציונליות הקיימת במיקרובקרים (MCU), עם מערך גמיש של התקנים היקפיים, על מנת ליצור פתרון כדאי מבחינת עלותו. הצגת המוצרים הנכללים במשפחת DSC מתחילה ב: (1) התקני MC56F80xx – הפועלים ב-32 מגה הרץ ומבוססים על הליבה 56800E ל-16 סיביות, ואשר מיועדים להתקני דחיפה מורכבים במידה סבירה, כגון בקרה וקטורית ללא חיישנים עבור משאבות, מניפות אוויר, מדחסים; ממשיכה עם: (2) בקרי DSC הפועלים ב-60 מגה הרץ ומיועדים ליישומים דורשניים יותר, כמו למשל מדיחי כלים חסרי חיישנים, ומגיעה עד ל: (3) בקרי 56F84xx הפועלים ב-100 מגה הרץ שהוכרזו רק לאחרונה, ואשר מבוססים על הליבה 56800EX ל-32 סיביות, ואשר מיועדים במיוחד להמרת הספקים ספרתית ולבקרה של מנועים כפולים ללא חיישנים.
המיקרובקר MC56F84xx ל-100 מגה הרץ ול-32 סיביות, הוא אחד מבין המיקרובקרים לעיבוד אותות ספרתיים, המהירים ביותר הקיימים בשוק, והוא מציע יכולות בלתי רגילות של דיוק, חישה ובקרה, לקבלת יישומים שהם בעלי הנצילות הגבוהה ביותר, הקיימים להמרה ספרתית של הספקים ויישומים מתקדמים ביותר לבקרת מנועים. הליבה 56800 ל-32 סיביות הפועלת ב-100 מגה הרץ וב-100 מיליון פעולות בשנייה (MIPS) מספקת את היכולות המתמטיות הדרושות ליישומי הספק וליישומי בקרת מנועים, המתקדמים ביותר. פעולות חישוב מתמטיות במחזור יחיד, תמיכה באריתמטיקה של שברים ושל העברות במקביל משפרות את הביצועים ודוחפות חוגי בקרה הדוקים יותר ומהירים יותר. יחידת המיקרובקר MC56F84xx כוללת התקנים היקפיים מתקדמים, בעלי מהירות גבוהה ודיוק גבוה, ייעודיים ליישומי זמן אמת. מודול אפנון רוחב אות לזמן אמת, בעל רזולוציה גבוהה (eFlexPWM), עם רזולוציה של 312 פיקו שנייה, מאפשר תדירויות מיתוג גבוהות מאוד, במקביל להקטנה של עלויות ולהגדלת הנצילות. בלוק PWM נוסף מאפשר מימוש של בקרת מנועים כפולים. שני ממירים אנלוגיים לספרתיים למהירות גבוהה ול-12 סיביות (ADC), עם תדירות דגימה המגיעה עד ל-3.33 מגה-דגימות בשנייה ב- 300 ננו שניות, משפרים את דיוק המערכת, על ידי הפחתת הריצוד (jitter) שבערכי הכניסה. ממיר SAR מאנלוגי לספרתי, שפועל ב-16 סיביות, עם חיישן טמפרטורה מובנה ופער פס (band gap) משמש למדידת יישומים כללית. ארבעה מעגלי השוואה (קומפרטורים) אנלוגיים, עם ממירים ספרתי לאנלוגי (DAC) משולבים, הפועלים ב-6 סיביות, מאיצים את זיהוי אירועי המערכת ומאפשרים ביצוע כיבוי חירום של יציאות אפנון PWM. קוצבי זמן רב-שימושיים מאפשרים תזמון עצמאי ויצירה של אותות PWM. בלוק ההשהיות הניתנות לתכנות (PDB) מיועד לעירור (triggering) ממיר ADC בחומרה, בסנכרון עם אותות PWM, אשר נדרשות ליצירה מחדש של זרם המנוע. בלוק מפענח הקידוד הניצב מספק את פענוח הקידוד של אותות המיקום מהמקודד הניצב, אשר משמשים בדרך כלל במערכות הינע של מנועים תעשייתיים. גמישות השימוש בזיכרון הבזק (Flash) של 64 קילו-ביית עד 288 קילו-ביית מספקת את יכולת השדרוג הנחוצה ליישומים חשובים של בקרת הספק ספרתית ושל בקרת מנועים. בקר הגישה הישירה לזיכרון (DMA) מקטין את כמות הפסיקות לליבה ומגדיל את הביצועים. זיכרון EEPROM מסוג FlexMemory של Freescale מספק פנקס רשימות עבור ערכים של כיול וכיבוי. יכולת ההגנה על הזיכרון מגדילה את הבטיחות של המערכת על ידי הגבלת קוד המשתמש ועל ידי כך שהיא מונעת ממנו גישה אל למקומות חשובים בזיכרון ואל אותם התקנים היקפיים השמורים לגישה של פיקוח על. כניסות ויציאות עמידות ל-5 וולט מספקות גמישות תכנון והפחתה בעלויות המערכת. קבוצה עשירה של התקנים היקפיים לתקשורת, לרבות ממשקי QSCI, ממשקי QSPI, אפיק I2C/SMBus ואפיק FlexCAN מאפשרים קישוריות רב תכליתית עם מערכות שולט/נשלט (master/slave). חיבור צולב בין מודולים (inter module crossbar) הוא התקן היקפי רב תכליתי אשר מספק אפשרויות חיבור כלליות בין ההתקנים ההיקפיים שעל השבב: ממירי ADC, ממיר DAC ל-12 סיביות, מעגלי השוואה, קוצבי זמן QuadTimer, מאפנני eFlexPWM, בלוקי PDB, EWM, מפענח קידוד ניצב ופינים נבחרים של יציאות וכניסות.
הבקרה הווקטורית הסינוסואידלית למנועים כפולים ללא חיישנים עם תיקון גורם הספק, היא רק אחת מבין היישומים שלהם מיועד 56F84xx. יישום זה אופייני עבור מכונות כביסה שבהן בקר DSC יחיד מבקר הן את המשאבה והן את ההינע הראשי, או עבור יחידת מיזוג אוויר להתקנה מחוץ למבנה שבה בקר DSC יחיד מבקר הן את המניפה והן את המדחס.
דרישות היישום עבור מערכות מסוג זה הן:
בקרה של מנועים סינכרוניים כפולים בעלי מגנט קבוע
בקרה וקטורית סינוסואידלית (שנקראת גם בקרה מוכוונת שדה – FOC) עבור שני המנועים
הערכת מיקום מנוע ללא חיישנים
מומנט התנעה גבוה בהפעלה
תדירות אפנון PWM של 8-16 קילו הרץ
חישת זרם תלת-פאזי באמצעות נגדי מיצד (shunt) (במקרים מסוימים עדיפה חישת זרם יחידה במתח ישר), חישה בקו מתח ישר
תיקון גורם הספק בכניסה (בתלות באזור ובהספק הכולל)
הגנה בחומרה ובתוכנה מפני תקלות
קישוריות עם מערכות שולט/נשלט
עמידה בתקני IEC60730 לבטיחות מכשירים ביתיים
הרעיון מאחורי הפתרון מוצג באיור 2. אפשר לראות שבקר DSC מבקר את היישום כולו – את שני המנועים, את תיקון גורם ההספק (PFC), מספק את הקישוריות, ומספק פעולות בקרת היישום על המכשיר הביתי כולו. חומרת מערכת ההספק כוללת שני ממירי הספק למתח חילופין (inverter) המחוברים יחד למעגל אספקת מתח ישר, המערכת האלקטרונית של תיקון גורם ההספק, חישת המתח והזרם ואת אספקת מתח העזר.
כפי שכבר צוין, האלגוריתם המתקדם לבקרת מנוע עבור המכשירים הביתיים המצויים כיום, מבוסס, בדרך כלל, על טכניקה של בקרה וקטורית (עיין באיור 3). שימוש באלגוריתם של בקרה וקטורית, בתהליך בקרה של השראה בזרם חילופין ובמנועי מגנט קבוע סינכרוניים, דומה לשימוש בבקרה של מנועי זרם ישר עם עירור נפרד. במערכת ייחוס מיוחדת אפשר להפריד את הזרמים של הסטטורים לרכיב שיוצר את המומנט ולרכיב שיוצר את השדה המגנטי. את הרכיבים האלה אפשר לייצג בערכים של זרם ישר ולבקר אותם, הן באופן נפרד וגם באופן עצמאי.
לאלגוריתם הבקרה הווקטורית נדרשת מדידה של זרמים תלת פאזיים באמצעות ממיר ADC מהיר. מדידת הזרם חייבת להתבצע בסנכרון עם האמצע של אותות PWM על מנת להימנע מרעש המיתוג, וכדי לקבל ערך בעל משמעות של הזרם בזמן ממוצע. בדרך כלל, מודדים בו זמנית זרמים של שתי פאזות, ומחשבים את זרם הפאזה השלישית. לכן, לבקר DSC יש אפשרות לדגום בפעם אחת שני זרמים בו זמניים בסנכרון עם אות PWM. זרמי הפאזה התלת פאזיים מומרים לקואורדינטות d/q מסתובבות, אשר בהן אפשר לבצע בקרה של הרכיב הנוצר מהמומנט, באופן נפרד מהרכיב שנוצר מהשטף. מערכת הבקרה כוללת שני חוגי בקרת זרם – האחד עבור המומנט (מיוצג באמצעות בקר q) והשני עבור השדה המגנטי, עבור השטף (מיוצג על ידי בקר d). הווקטור של מתח המוצא מחושב לפי התוצאות של שני הבקרים האלה באמצעות טכניקה של אפנון הווקטור המרחבי (space vector modulation) וכן, מיוצרים אותות PWM המשלימים שמתאימים עבור הממיר למתח חילופין. במקרה של מהירויות מנוע גבוהות, מעל לערך הנקוב, יש לכלול אלגוריתם מיוחד אשר מאפשר פעולה באזור שבו השדה נחלש. מעבר לכך, למנועים מסוימים יש מומנט מיאון (reluctance torque) חזק. על מנת להשתמש במומנט מיאון זה ובכך לאפשר יצירה של המנוע הקטן ביותר האפשרי (והכדאי ביותר מבחינת העלות), אנשי הפיתוח מממשים אלגוריתם מיוחד המכונה מומנט–מרבי–לכל–אמפר (MTPA), אשר מאפשר ניצול מלא של מומנט המיאון. אלגוריתם MTPA יוצר גם שיפור בנצילות. הבקרה הנפרדת והעצמאית של הזרם הנוצר מהמומנט ושל הזרם הנוצר מהשטף מאפשרת פעולה דינמית ביותר, החל ממהירויות נמוכות מאוד, עם מאפייני בקרה מצוינים.
כדי שתהיה לאלגוריתם הבקרה הווקטורית פונקציונליות מתאימה, נדרש לו מידע לגבי המיקום והמהירות. במערכות הינע תעשייתיות, מידע זה מסופק באמצעות חיישני מיקום ומהירות מכניים, כדוגמת מקודד, ממיר מיקום או אף באמצעות חיישן מיקום Hall. החיישן המכני יקר מדי עבור רוב מערכות ההינע של המכשירים הביתיים של ימינו. במקרים מסוימים יש גם קושי להשתמש בו בגלל מגבלות מכניות בתוך משאבות או מדחסים. לכן, במקום זאת, יש לחשב את המיקום והמהירות של המנוע בעזרת אלגוריתמים מתקדמים ללא חיישנים. האלגוריתם השימושי ביותר לחישוב מיקום ללא חיישנים של מנועי מגנט קבוע סינכרוניים מבוסס על חישוב באמצעות המודל המתמטי של הכוח האלקטרו-מניע ההפוך (Back-EMF) של המנוע. למודל Back-EMF המתמטי נדרשים הפרמטרים המתאימים של המנוע, המתח המופעל עליו וזרמי המנוע. בזמן פעולה, בקר DSC פותר את המשוואות, מפעיל מסננים וכלי הערכה (estimator) ספרתיים ומחשב את המיקום והמהירות הנדרשים לפעולה הנכונה של אלגוריתם הבקרה הווקטורית. מאחר שהמודל מבוסס על מתח Back-EMF של המנוע אשר נעלם במהירות אפס, ברור מאליו שהשיטה הזו אינה יכולה לספק מידע לגבי המיקום והמהירות, במהירות נמוכה מאוד או במהירות אפס. על כן, לשיטה זו נדרש אלגוריתם של תחילת הפעולה – בדרך כלל התנעת התנועה בחוג פתוח עם סוג מסוים של מגבלות מומנט וזרם.
על מנת לחשב את כל האלגוריתמים האלו, יש צורך שלמעבד תהיה יכולת חישוב גבוהה. הדורשני מכולם הוא חוג הבקרה של אלגוריתם הבקרה הווקטורית, אשר כולל יצירה מחדש של זרם הפאזה, חישוב הטרנספורמציות של הזרם לקואורדינטות מסתובבות, בקרי הזרם, אפנון הווקטור המרחבי, וכל כלי ההשוואה והתיקון (observer) של כוח Back-EMF וכלי ההערכה והמסננים של המיקום והמהירות. החישוב של חוג הבקרה המהיר חייב להיעשות באופן מסונכרן עם התדירות של אות PWM, והוא בדרך כלל פועל על כל אחד מאותות PWM, כלומר במשך פרק זמן של 63 עד 125 מיקרו-שנייה, עבור אות PWM של 8 עד 16 קילו-הרץ.
לבקרת מנועים כפולים יש צורך בחישוב של שני אלגוריתמי בקרה וקטורית בשלמותם ובמקביל. בדרך כלל, מעגל יחיד של אספקת מתח ישר לממיר למתח חילופין משמש בשיתוף בין המנועים. על מנת להקטין את עומס הזרם שעל קבל יחיד של מעגל אספקת המתח הישר, וכדי להשיג אדווה (ripple) מזערית של המתח במעגל האספקה, אותות PWM של שני המנועים האלו מוזזים האחד מהשני ב-50 אחוזים מזמן המחזור של אות PWM. הזזת PWM זו מאפשרת ביצוע דגימה לסירוגין בממיר ADC, כך שמספיק להשתמש בשני ממירי ADC. לאחר מכן, החישוב של החוג המהיר של אלגוריתם הבקרה הווקטורית ללא חיישנים עבור כל מנוע מתבצע לסירוגין אף הוא.
קיימת אפשרות שיידרש גם תיקון גורם הספק (PFC). אפשר לממש כמה סוגי טופולוגיות של תיקון גורם הספק, בתלות בדרישות הביצועים, בהספק המוצא ובתנאי העומס. תיקון PFC סירוגי (interleave) הפועל במצב הולכה רציף, משמש לעתים קרובות בתנאי צריכת ההספק הגבוהה האופיינית לפעולה של מנועים כפולים. תיקון גורם ההספק הסירוגי פועל עם שני מתגי הספק בטרנזיסטורי MOSFET ועם שני משרנים לתיקון PFC. המיקרובקר חש את זרם הכניסה ומבצע בקרה של מתגי ההספק על מנת לשמור את זרם הכניסה כאות סינוסואידלי ומסונכרן עם רשת החשמל. תדירות אות PWM אופיינית עבור תיקון גורם ההספק נמצאת בטווח של 50 עד 100 קילו-הרץ.
כפי שאפשר לראות, לאלגוריתם המתקדם לבקרת מנוע נדרשות תכונות ייעודיות של ההתקנים ההיקפיים וביצועי יע”מ (CPU) במיקרובקר במטרה לנהל את שני המנועים וגם את תיקון גורם ההספק. מעבר למשימות אלו, למיקרובקר נדרשים 50 אחוזים לפחות מזמן החישוב, לצורך ביצוע משימות אחרות ייחודיות למשימות. MC56F84xx של Freescale עומד בדרישות היישום האלו והוא המועמד המתאים ביותר לשימוש ביישומים מתקדמים כאלו.
לזמינות של מערכת סביבתית עבור בקר DSC יש חשיבות גבוה ביותר עבור הצלחת הפיתוח של היישום, כדי שתאפשר לאנשי הפיתוח לתכנן את המערכת המורכבת בזמן סביר. בנוסף לכלים הסטנדרטיים, כמו למשל, מהדר (compiler), מנפה שגיאות (debugger), הערות ייעודיות ליישום ותכנונים לייחוס, Freescale מציעה שני כלים שאמורים למשוך מייד את תשומת ליבם של אנשי הפיתוח – האחד הוא מנפה השגיאות לזמן אמת FreeMASTER והשני הוא ספריות התוכנה המשובצות.
הכלי FreeMASTER, הוא כלי ידידותי למשתמש לניפוי שגיאות בזמן אמת, לניטור ולהצגה של נתונים. יישום בקרת המנוע מייצג יישום משובץ לזמן אמת עם כמה משתני מערכת ועם כמה פרמטרים של בקרה. את הפרמטרים המשתנים האלו יש לבחון ולהעריך בזמן אמת, על מנת לפתח להקים ולכוונן באופן אופטימלי את אלגוריתם הבקרה. באופן מסורתי, השתמשו אנשי הפיתוח בכלי ניפוי שגיאות מקוד ובמשקפי תנודות (oscilloscope) לצורך פיתוח יישומים של בקרת מנועים. ואולם, פיתוח מסורתי כזה הוא מפרך למדי. לעתים קרובות, הכלים לניפוי שגיאות לא איפשרו לצפות במשתני היישום ולשנות אותם, והיה צורך לעצור את המעבד של יישום המטרה על מנת לגשת למשתנים אלו. גישה כזו אינה ישימה ביישומים של בקרת מנועים – איש הפיתוח אינו יכול סתם כך לעצור את המנוע כדי לגשת לזיכרון של המעבד, ולאחר מכן, לאפשר למנוע לפעול שנית. הגורם המקביל בשימוש במשקף תנודות, הוא העובדה שהאותות האמיתיים של מערכת הנעה, לא פעם, שונים מהאותות הנמדדים על ידי המעבד. האותות הנמדדים מושפעים ממעגל החישה שנמצא בשימוש, מרעש המדידה וגם משגיאת ההיסט וההגבר של הממיר מאנלוגי לספרתי. הסימון של האותות משפיע על דיוק המדידה. שימוש במשקפי תנודות לצפייה במשתנים פנימיים, די מוגבל אף הוא.
כלי ניפוי השגיאות לזמן אמת (FreeMASTER) תוכנן לפשט את תהליך הפיתוח של יישומי בקרת מנועים. הכלי FreeMASTER תומך בניטור לא פולשני לחלוטין של משתנים הפועלים במערכת משובצת. איש הפיתוח של המערכת המשובצת יכול להציג משתנים מרובים של היישום, אשר משתנים בזמן על גבי תצוגה שנראית כמו משקף תנודות, או לצפות בנתונים מוצגים כטקסט. בנוסף, המשתמש יכול גם לשלוט – מהמחשב האישי המארח – ביישום המשובץ הפועל במעגל המטרה. אזור הצפייה בנתונים המבוסס HTML, ניתן להרחבה במידה רבה. המשתמש יכול לספק – בחלון הבקרה – פקדי מדידה, פקדי חוגה, פקדי לחצן, פקדי זחלן עבור מכשור, מבוססי Active-X, כדי ליצור לוחות מכשירים חזותיים בהתאמה אישית – מורכבים או אלגנטיים, לפי הרצון.
ספריות התוכנה המשובצת של Freescale היא קבוצה נרחבת של אלגוריתמים, המיועדת לפיתוח של יישומים מתקדמים של בקרת מנועים. ספריית הפונקציות הכללית (GFLIB) מספקת פונקציות מתמטיות, פונקציות טריגונומטריות, טבלאות חיפוש ופונקציות בקרה. מודולי תוכנה אלו הם בלוקי בנייה בסיסיים. הספרייה לבקרת מנועים (MCLIB) כוללת פונקציות של אפנון וקטורי, טרנספורמציה ופונקציות ייעודיות שקשורות למנועים, לצורך יצירה של מערכות מנועים מבוקרות באופן ספרתי. ספריית המסננים הספרתיים הכללית (GDFLIB) מספקת פונקציות של מסננים לצורך שיפור אותות (conditioning). ספריית הבקרה המתקדמת (ACLIB) כוללת פונקציות חשובות עבור בקרה ללא חיישנים של מנועי מגנט קבוע סינכרוני.
האלגוריתמים שבספריות התוכנה המשובצת מותאמים באופטימיזציה באופן מיוחד, נבדקו באופן מעמיק עם מאות אלפי וקטורי בדיקה, והם מתועדים באופן מלא. למשתמש הרגיל קל להשתמש בהם, מפני שהם ממומשים עם ממשק פונקציה שניתן לקריאה בתוכנת C. הספריות זמינות כיום עבור הפלטפורמות 56800E/EX, ColdFire®V1, ו-Power . אלגוריתמים אלו מאיצות באופן משמעותי את הפיתוח עבור אנשי פיתוח מתחילים, שיוצרים יישומים פשוטים, וגם עבור מקצוענים שעובדים על מערכות דינמיות מורכבות בזמן אמת, כדוגמת בקרת מנועים, המרת אנרגיה ויישומים משובצים אחרים לזמן אמת.
לסיכום, מנועים תלת פאזיים שמבוקרים על ידי אלגוריתמים מתקדמים ללא חיישנים ישמשו לעתים קרובות יותר ויותר במגוון רחב של מערכות הינע, לרבות מכשירים ביתיים. חברת Freescale מציעה קבוצה מקיפה של בקרי אותות ספרתיים ייעודיים, שרשרת כלים עשירה ואת הידע הנחוץ, אשר מאפשר את המימוש של אלגוריתמי בקרה מורכבים אלו ביישומים, ומאפשר את ההשגה של הביצועים הנדרשים, במהירות וביעילות.
