















למרות שלעיתים נדמה שהכל הופך לדיגיטלי, השליטה פיזית בעולם האמיתי אינה הולכת להיעלם בקרוב. המגמה של להפוך את כל ההיבטים של הסביבה האנושית לאוטומטיים גרמה לשימוש מאסיבי במערכות בקרת תנועה. לבקרת תנועה תפקיד מרכזי בחיבור בין העולם הפיזי לזה הדיגיטלי, על ידי תרגום נתונים דיגיטליים לתנועה פיזית. בעוד שאוטומטיזציה ורובוטיקה חודרות ליישומים המיועדים לצרכנים, כמו גם אלה ליישומים תעשייתיים, בקרי תנועה וכונני מנוע חודרים לתחומים שבהם מעולם לא היה צורך קודם לכן, ומנועים חשמליים קטנים הפכו לנוכחים בכל מקום.
מפתחי מוצרים צריכים להתמודד עם מערכות שהופכות למורכבות יותר ויותר, ואינם יכולים כיום להיות מומחים בכל תחומי ההנדסה הנדרשים לבניית מערכות המשנה. בקרת תנועה הוא אחד מאותם תחומי מפתח של ידע. עם זאת, הידע לשאול את השאלות הנכונות לפני בחירת מכשיר להטמעת בקרת תנועה בעיצוב אינו תמיד אינטואיטיבי. אנו משתמשים בייצור הדפסה בתלת מימד / שולחן עבודה דיגיטלי כדוגמה מהעולם האמיתי לאופן שבו בקרת תנועה משפיעה על יישום.
מהי בקרת תנועה?
בקרת תנועה היא חלק מהאוטומציה המטפל בהיבטים של קינמטיקה ואלקטרומכניים במכונות באופן מכוון ומבוקר. המרכיבים העיקריים של מערכת בקרת תנועה הם הבקר ומגבר הכוח, או שלב הדרייבר. משימות בקרת תנועה טיפוסיות כוללות יצירת פרופיל מהירות רמפה / תנועה, micro-stepping ופעולת לולאה סגורה.
אולם כיום בקרת תנועה פירושה יותר מאשר שליטה בלבד: המשמעות הינה גם תכנון תנועה של יותר מציר אחד, או החלטה בנוגע לכל התנועות המובחנות אשר יקבעו את אופן התנועה של אובייקטים בממדים מרובים לאורך זמן. בקרת תנועה כבר אינה רק פריט לסימון ברשימת העיצוב והתכנון, וזאת מכמה סיבות. האחת היא כי האלגוריתמים המשמשים להטמעה השתנו, וגם הם הופכים ליותר מורכבים.
ככל שרמת האוטומטיזציה ממשיכה לעלות, שינוי נוסף שחל הוא העלייה הדרמטית במספר המנועים החשמליים שנעשה בהם שימוש גובר ביותר ויותר יישומים וסביבות הפעלה שונות, מה שמעלה את הדרישות בכל הנוגע לדינמיקה, רמה נמוכה של פליטות רעש ויעילות אנרגטית. במקביל, מנועים אלה הופכים לקטנים יותר, חזקים יותר ויעילים יותר, וזאת בעוד הציפיות לגבי איכות פונקציות בקרת התנועה עולות.
כיום, משימות העיבוד כוללות הפכו לכבדות יותר ומורכבות יותר משהיו בעבר, ממספר סיבות.
כיום קיימים כבר אלגוריתמים מורכבים לבקרת תנועה ומנועים, אך ניתן להשתמש בהם רק ביישומים יקרים, וזאת בשל חוסר במיקרו-בקרים קטנים וחזקים. כיום, אלה אלגוריתמים הולכים והופכים למיינסטרים, והשימוש בהם במערכות קטנות מוטמעות הופך לריאלי. בנוסף, בשל השילוב הגובר של בקרת תנועה, זו הפכה למשימת עיבוד משני. המהנדסים כיום חייבים להתמקד בעיקר ביישומים שלהם, כך שמשימות העיבוד העיקריות שלהם הן ברמת היישום, לדוגמה זיהוי תמונות, מחשוב חזותי, הצפנה / פענוח ואינטליגנציה מלאכותית.
מורכבות עיבוד נוספת נובעת גם מהעובדה שהתקשורת כיום כוללת ערוצי בקרה ומשוב, וכן ממשקי תקשורת ברמה נמוכה, רוחב פס גבוה ואפיקי תקשורת (bus). כמו כן, מימוש סינכרוניות, התנהגות בזמן אמת וזמני תגובה מהירים הפכו לדרישות חובה בסינכרון צירים מרובים.
תוצאה נוספת הנובעת משינויים אלה היא שבקרת התנועה בעיצובים רבים הפכה לאבן יסוד. המהנדס צריך עכשיו לשקול לא את מרכיב המנוע ומהירות הסיבוב שלו, אלא גם איך הוא מתחבר ומה יחסי הגומלין עם כל מרכיבי היסוד האחרים בעיצוב חומרה אמיתית, כמו גם מנקודת מבט התוכנה: למשל חיישנים, ציר ממונע נוסף באותה מכונה או על גבי אותו לוח, או מכונות אוטומטיות אחרות המחוברות דרך רשתות מסוגים שונים.
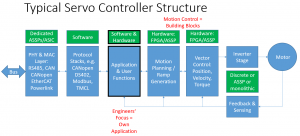
איור 1: בקרת תנועה מוטמעת בארכיטקטורת בקר servo טיפוסית
החלטות בנוגע להטמעה
כיום, מהנדסי עיצוב המפתחים מערכות בקרת תנועה חייבים להתמודד לא עם שאלות הקשורות לטכנולוגיה, אלא גם עם רשימה ארוכה של אתגרים מסחריים ושאלות הקשורות לפרויקטים המשפיעות על ההחלטות שלהם בנוגע להטמעה.
כדי לבחון האם חלק מדורגות גבוה יותר מאחרות, שאלנו את מהנדסי היישומים שלנו מה הן חמש השאלות, בעיות או נושאים הנפוצים ביותר אשר הלקוחות מציגים בפניהם פעם אחר פעם. והן:
- זמן הגעה לשוק – הדרישות עבור כלל מחזור הפיתוח, כולל אב-טיפוס ושאר שלבי הפיתוח, עד לשלב הבדיקה והייצור הופכות למורכבות יותר ויותר. לכן, מוצרים המשמשים את החלק של בקרת תנועה במערכת מכטרונית חייבים להיות קלים לשימוש, קלים להבנה, וכאלו שקל לתת להם פרמטרים. מהנדסים רוצים מוצרים שניתן להשתמש ישירות מהקופסה ולספק את הכלים הנחוצים שניתן יהיה להשתמש בהם מבלי שיהיה צורך לקרוא תחילה גיליון נתונים בן 200 עמודים. עיצוב מובנה מהיר משמעותו שהם יכולים להתחיל להתמקד ביישום שלהם מהר יותר.
- מזעור / אינטגרציה רבה ביותר – מנועי בקרת תנועה מוטמעים הופכים לקטנים יותר, וכך גם החלל הפנוי לסוג כלשהו של שלב דרייבר או רכיבי אלקטרוניקה משולבים. בו בזמן, מה שבעבר ניתן היה לעשות רק בבקרי מיקרו גדולים (MCU) ניתן כיום לעשות גם באמצעות חלקים חכמים עשויים סיליקון. המהנדסים מחפשים את המידה הרבה ביותר של אינטגרציה, הן מבחינה פונקציונאלית והן מבחינה פיזית, ושתתפוס הכי מעט מקום ככל שניתן. הדבר נכון הן באריזות סיליקון והן באריזות מוצרים, כאשר יותר ויותר מהנדסים משתמשים במערכות על גבי שבב (SoCs), ובתצורות של מערכת בחבילה (SiP) יחד עם לוח מעגל מודפס קטן (PCB).
- הפחתת עלויות – הלחץ על יצרני ציוד מקורי (OEM) והמהנדסים שלהם לקצץ בעלויות ממשיך כל העת. זה כולל עלות חלקים בהיקף הייצור והעלות הכוללת של בעלות על תוכנה, מודול חומרה וסיליקון.
- איכות בקרת תנועה – דרישות הביצועים של יישומי בקרת מנוע ובקרי תנועה הולכות ומתעצמות, כך שגם האיכות הכוללת של עיצובים אלה צריכה לעלות. המושג איכות בקרת תנועה כולל מימדים מרובים ולכולם השפעה על איכות המוצר הסופי, כולל אך לא מוגבל ל: רעש, דיוק, יעילות, התנהגות דינמית ודיוק.
- ממשקים, לא מנועים – יותר ויותר מהנדסים אינם מכירים את הפיזיקה של בקרת תנועה ומנועים, וחסרה להם ההבנה של האתגרים המכניים ואלו הקשורים לחומרים. בחברות סטארט-אפ ובחברות קטנות, כמו גם בחברות גדולות יותר, יש דור שלם של מהנדסים ממוקדי תוכנה, שאינם מכירים מנועים, מכניקה או חומרים. הם רוצים לעבוד עם ממשקים, ולא עם מנועים. מגמה זו מעלה את רמת האבסטרקציה הנדרשת במוצרים המשמשים לפיתוח, אשר בתורה מחייבת גישה של היסודות לבקרת תנועה.
דוגמת יישום: ייצור דיגיטלי (הדפסה בתלת מימד ומכונות CNC)
יש יותר ויותר מכונות תעשייתיות שעוברות תהליך מזעור לתוך התקנים שולחניים. הדוגמאות נעות בין ציוד להכנת סתימות לשיניים ושתלים בהם משתמשים רופאי שיניים בקליניקות שלהם, ומדפסות תלת-ממד על שולחנות עבודה של מהנדסים רבים, אשר מדפיסים כיום חלקים לשימוש קצה שניתן לשכפל אותם באופן מדויק, כמו גם אבי-טיפוס.
ככל שיישומים מודרניים לייצור בשולחן העבודה, כמו הדפסת תל מימד, CNC, וחיתוך לייזר, הפכו ליותר בשלים ונגישים, מוצרי קצה בעולם האמיתי יכולים כעת להיות מיוצרים ישירות מתוכנת עיצוב. ה-CNC מאפשר כבר כעת איכות גבוהה בייצור אצווה קטנה.
בקרת תנועה הופכת לבעלת תרומה ניכרת להצלחה של CNC והדפסת תלת מימד, אם טכנולוגיות תעשייתיות אלה מצופות לחצות בהצלחה את הגבול שבין חובבי טכנולוגיה למשתמשי מיינסטרים. ייצור באיכות גבוהה של צורות רב מימדיות דורש תיאום מדויק על גבי שניים, שלושה, או יותר צירים, בשילוב עם מהירות גבוהה יותר דיוק של החלקים המיוצרים. בנוסף זה דורש רמת רעש ורטט נמוכות יותר. בנוסף, מכונות אלה צריכות לספק כל זאת בעלות נמוכה בהרבה.
איכות בקרת תנועה
המושג של איכות בקרת תנועה מכסה מספר רב של מימדים: רעש, דיוק, יעילות והתנהגות דינמית. בהדפסת תלת מימד, שיקולים מרכזיים הם הפחתת הרעש, דיוק של מנגנוני ההדפסה, סינכרון מדויק של צירים מרובים במהירויות גבוהות, וניצול של בקרת מנוע בלולאה סגורה ולולאה ובקרת servo להגדלת מהירות ההדפסה והדיוק.
מנועי צעד משמשים לעתים קרובות לשירותי מיקום מדויק ביישומים כגון מכונות CNC ורוב מדפסות התלת מימד השולחניות. למרות שהן מועדפות בשל האמינות הגבוהה שלהם בעלות נמוכה, החיסרון שלהם הוא ברמות רעש גבוהות, גם במהירויות נמוכות או במצבי מנוחה. מאחר שמדפסות והתקנים שולחניים ממוקמים לעתים קרובות על או לצד השולחן של המשתמש המסחרי, הרעש עלול להפריע, במיוחד במהלך עבודות הדפסה שלעיתים נמשכות שעות.
בעזרת תהליכי הבקרה המודרניים ופריסה מוקפדת, מנועים אלה יכולים לפעול כמעט ללא רעש. עד כה, מקור הרעש העיקרי היה מצבי ההנעה הפחות ממיטביים של המנועים, אשר הובילו לרטט ולתהודה של המכניקה למיקום ראשי הדפסה והמנוע. הדרך הטובה ביותר להפחית פליטות אקוסטיות היא להפחית תהודה ורטט של הרכיבים המכניים על ידי הגדלת רזולוציית באמצעות דרייברים חכמים. צעדים קטנים יותר, המכונים “צעדי מיקרו” (microstepping), פעולות מוטוריות חלקות, צמצום משמעותי של התהודה, וניתן גם להגדיל את מהירות המדפסת.
באמצעות שימוש במשוב אנקודר של לולאה סגורה ניתן להשוות את המיקום בפועל של המנועים עם עמדת המטרה שלהם וההבדלים שתועדו. ללא לולאה סגורה החלק עשוי באמת לעמוד באופן מדויק במפרט אך אין כל הוכחה, ולא ניתן להבטיח את רמות הדיוק.
בנוסף, ניתן להשתמש במשוב אנקודר לבקרת סרוו של המנועים באמצעות אלגוריתמים בקרה מוכוונת שדה (FOC). אלגוריתמים אלה דורשים בדרך כלל מאמץ חישובי מסויים: משוב ודגימה אנלוגית, PID, מטריצת טרנספורמציות ו-PWM. יש גם אילוצים בזמן אמת שהופכים אותם למועמדים מושלמים להטמעה בחומרה, בתוך דרייברים חכמים או IC בקרי ברוו ייעודיים. היתרון של FOC הוא שיפור יעילות המנוע, כמו גם מניעת אובדן צעד.
בקרת מנוע בלולאה סגורה ובקרת סרוו יכולים לשמש גם כדי להגדיל את מהירות ההדפסה ואת הדיוק של ייצור שולחן העבודה.
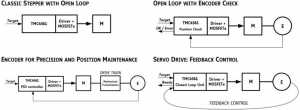
איור 2: הבדלים בארכיטקטורות טיפוסיות של בקרת מנוע צעד
העתיד של בקרת תנועה
בקרת תנועה נמצאת בסביבה כבר זמן ממושך מבחינת היבטים רבים שלה. אבל מה חדש כיום? ומה ניתן לצפות בעתיד? אנחנו ב TRINAMIC Motion Control משוכנעים שישנן מספר מגמות חשובות, מתמשכות שיעצבו באופן ניכר את העתיד של בקרת תנועה והאופן בה צריך להשתמש בה.
בקרת תנועה תהפוך לאבן יסוד
במערכות ובסביבות מרושתות, מונחים כמו “IoT” או “קלט ופלט” הם הדומיננטיים כיום כמו גם הממשקים. בסיבה זו, החשיבה של מהנדסים הופכת יותר ממוקדת תוכנה ויותר ממוקדת על אבני יסוד מוכנים לשימוש ורכיבים המגיעים עם ממשק ו- API מוגדר, או אפילו סטנדרטי, שניתן לשלבו בקלות. בעולם כזה, בקרת תנועה היא רק חלק אחד של מערכת – לעתים קרובות רק חלק היקפי משום שהחלק העיקרי (מנקודת מבט הנדסית) הוא היישום עצמו. לכן, בקרת תנועה חייבת להיות שמישה כמו כל חלק משנה אחר עם ממשק מסויים ומערכת תפקוד מוגדרת.
אינטגרציה גוברת
התקני בקרת תנועה, SoCs ושבבים יכללו לא רק בלוקים אנלוגיים (ADCs, דרייברים של שערים, רגולטורים של מתח) ויסודות דיגיטליים סטנדרטיים (לוגיקת תקשורת, PWM). הם גם יהפכו לחכמים ומורכבים יותר. שילוב פרוטוקולי תקשורת, משימות מיזוג אותות, חישוב פרופיל תנועה מיידי, אלגוריתמים של high-end commutation ולולאות בקרה יהפכו התקנים אלה לחכמים יותר. תהיה תחרות קשה מאוד בהיבטים של אינטגרציה פונקציונלית ומזעור, בין אם אנחנו בוחנים ICs מסיליקון יחיד, SoCs, או מערכות על מודולים (SoMs).
בקרת התנועה תהפוך לנוכחת בכל
העולם יהפוך לאוטומטי יותר ויותר. בקרת התנועה תמשיך להשתלט על יישומים, משימות וצרכים רבים יותר בתוך הסביבות האישיות והתעשייתיות באופן שיהיה כמעט מבלי משים. דבר זה יגביר את הדרישות בכל הנוגע לאיכות בקרת התנועה מבחינת היבטים של בטיחות, אמינות, יעילות, דיוק, ולבסוף, אך חשוב בה במידה, רעש.
אודות בקר התנועה של TRINAMIC
בקר התנועה של TRINAMIC מפתח את הטכנולוגיה המתוחכמת ביותר בעולם ליישומי בקרת תנועה ומנוע. ה- ICs, מודולים ומערכות מכטרוניות המובחרים שלנו מאפשרים למהנדסי התוכנה כיום לעסוק בפיתוח מהיר ואמין של כוננים מדויקים ביותר הפועלים ביעילות, באופן חלק ובשקט. המשרדים הראשיים של חברת Trinamic ממוקמים בהמבורג, גרמניה ויש לה מרכזי מחקר בטאלין, אסטוניה, ומחלקת מהנדסי מכירות הן בשיקגו אלינוי בארה”ב והן בסו, IL, ארה”ב וב- Suzhou, סין.
www.trinamic.com/motioncontrol
